在港口無人水平運輸場景中,經(jīng)緯恒潤提供了車、路、網(wǎng)、云、圖全棧式自研解決方案,包含了自動駕駛車輛、路側(cè)車路協(xié)同、全場高可靠定位、5G遠程駕駛、運營調(diào)度管理、數(shù)字孿生、仿真系統(tǒng)、高精地圖等專業(yè)模塊,組成了一套完整的智慧港口解決方案。
車輛精準對位系統(tǒng)CPS(Chassis Positioning System)作為港口無人水平運輸系統(tǒng)中影響作業(yè)效果最關鍵的組成部件之一,需要能夠快速且精準地為作業(yè)車輛提供具體距離與方向上的引導,從而為實現(xiàn)高度自動化裝卸集裝箱的過程提供保證。CPS系統(tǒng)引導的精確性直接影響作業(yè)車輛的作業(yè)效率與成功率。現(xiàn)有的傳統(tǒng)CPS主要是基于單線雷達配合機械旋轉(zhuǎn)結(jié)構(gòu)來實現(xiàn)對一個區(qū)域的掃描,在多車道作業(yè)場景下,僅能支持一個車道作業(yè),且切換車道時機械結(jié)構(gòu)需要進行較大幅度的移動,導致檢測精度降低,影響整體自動化作業(yè)的流暢性。
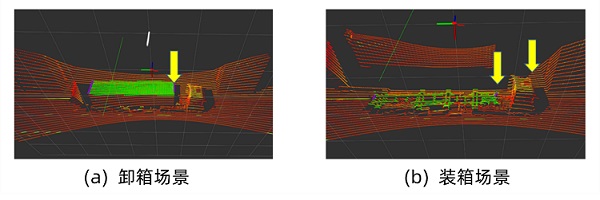
為了解決上述問題,經(jīng)緯恒潤自研了CPS系統(tǒng),其采用多線激光雷達同時對多個車道進行立體覆蓋檢測,利用充足的點云數(shù)據(jù)對箱體與車輛進行高精度定位。通過與云端調(diào)度系統(tǒng)進行通信交互,無論是有人/無人集卡作業(yè)過程均能實現(xiàn)高效的位置引導,較大地提高了作業(yè)效率。此外,經(jīng)緯恒潤自研CPS系統(tǒng)相較于單線雷達系統(tǒng)還具有多車道同時檢測、瞬時切換車道、輸出穩(wěn)定跳變幅度小等優(yōu)勢。
系統(tǒng)介紹
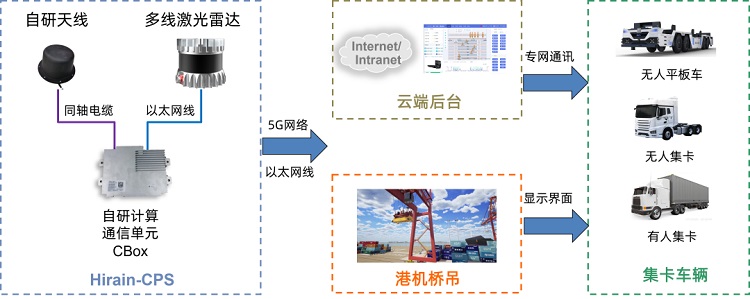
經(jīng)緯恒潤CPS系統(tǒng)主要由傳感器、計算單元、通信單元三部分組成。傳感器采用多線激光雷達方案,可以全面覆蓋待檢測車道,避免了機械機構(gòu)帶來的不穩(wěn)定性,支持多車道同時檢測;計算單元采用經(jīng)緯恒潤自研平臺,可以實現(xiàn)從底層硬件、操作系統(tǒng)到應用算法的全流程可控;通訊單元可以支持5G、有線網(wǎng)絡和V2X等多種通訊鏈路,系統(tǒng)的安裝部署更加靈活。
系統(tǒng)特點
除了傳統(tǒng)的車輛定位及引導功能,經(jīng)緯恒潤CPS系統(tǒng)還依托公司自動駕駛系統(tǒng)的平臺優(yōu)勢,針對現(xiàn)場作業(yè)的痛點問題,形成了以下的特色功能。
▎性能穩(wěn)定,快速響應
由于無人集卡作業(yè)對于CPS系統(tǒng)的檢測精度要求更高,同時受CPS系統(tǒng)的作業(yè)環(huán)境限制(往往只能安裝在橋吊的部分位置上),計算單元只能使用嵌入式設備。經(jīng)緯恒潤CPS系統(tǒng)的檢測算法進行針對性優(yōu)化,既滿足在有限算力平臺上長時間穩(wěn)定運行,又保證自動駕駛車輛引導任務的性能要求。
同時,針對現(xiàn)場作業(yè)異常場景出現(xiàn)概率低、難復現(xiàn)的問題,經(jīng)緯恒潤CPS可以實時對異常場景數(shù)據(jù)進行存儲和記錄,快速定位和解決問題,提高生產(chǎn)效率。
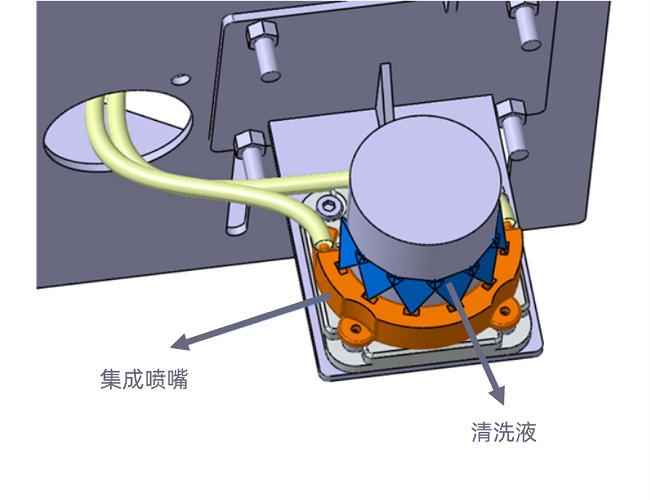
▎自動清洗,便捷維護
經(jīng)緯恒潤CPS針對港口散貨裝卸等多沙塵場景,提供了選配的自動清洗裝置,可以完成對于雷達設備泥土、污漬的自動化清洗,大大降低日常維護保養(yǎng)的成本。
應用案例
目前,經(jīng)緯恒潤CPS產(chǎn)品已在京唐港集裝箱碼頭部署運營,為港口高級別智能駕駛業(yè)務自動駕駛系統(tǒng)提供了有力支撐,已經(jīng)可以很好地實現(xiàn)無人智能集卡全自動裝卸箱的整體流程,裝卸箱過程的作業(yè)效率相對人工更高。同時,無人作業(yè)也為安全性提供了保障。
岸橋部署如下圖所示,設備安裝于岸橋的聯(lián)系梁上。岸橋需要檢測的車道數(shù)量更多,經(jīng)緯恒潤CPS系統(tǒng)的檢測算法做了相應調(diào)整,可同時覆蓋橋下各個作業(yè)車道。
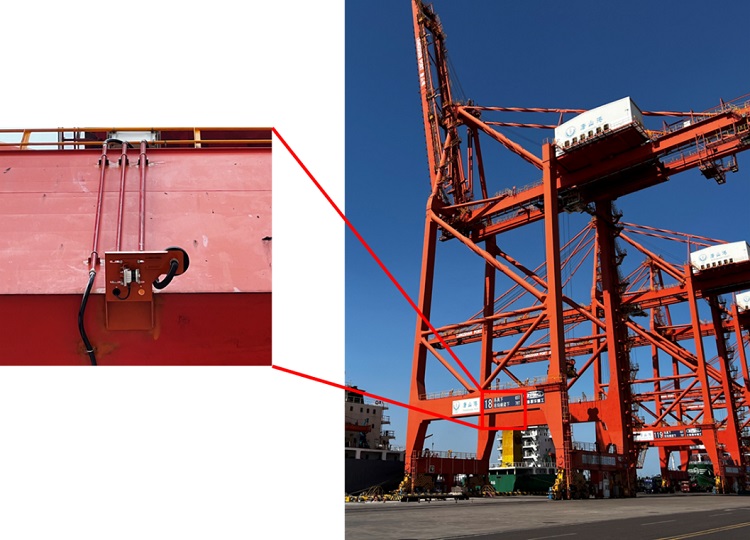
岸橋部署
場橋部署如下圖所示,設備安裝于靠近作業(yè)車道一側(cè)的橋梁上,結(jié)合雷達FOV視場角計算確保可以對有人/無人集卡兩條車道的檢測及精確引導。

場橋部署

