隨著整車功能的不斷演進(jìn),車上各類用電設(shè)備(控制器、執(zhí)行機(jī)構(gòu)、感知設(shè)備等)的用電功耗越來(lái)越大,為了降低整車能耗,國(guó)內(nèi)外很多OEM及Tire1都在考慮相關(guān)的機(jī)制及方案,其中PN局部網(wǎng)絡(luò)管理機(jī)制,以其簡(jiǎn)單、靈活的特點(diǎn)獲得眾多落地應(yīng)用。
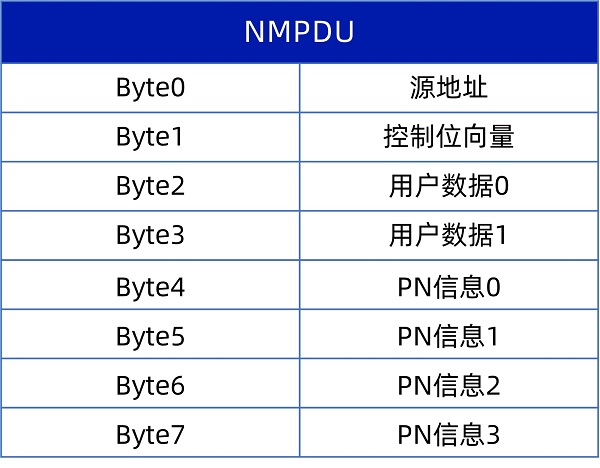
基于AUTOSAR方案的局部網(wǎng)絡(luò)管理機(jī)制,通常簡(jiǎn)稱為AUTOSAR PN(Partial Network),局部網(wǎng)絡(luò)管理本質(zhì)上是要實(shí)現(xiàn)只讓需要支撐功能實(shí)現(xiàn)的控制器工作,其他控制器保持在低功耗狀態(tài)。AUTOSAR PN是通過(guò)NM報(bào)文(NMPDU)的方式來(lái)達(dá)到此目標(biāo),NMPDU的典型格式如下表所示。
PN開發(fā)流程
當(dāng)前OEM的車型平臺(tái)大多為迭代開發(fā),依托現(xiàn)有平臺(tái)增加PN通常是較快速的方案。所以相較于復(fù)雜、全面的AUTOSAR正向PN開發(fā)方法論,OEM更多采用逆向的開發(fā)方式。逆向的PN開發(fā)流程通過(guò)分析當(dāng)前現(xiàn)狀來(lái)完成PN的開發(fā),選取整車改動(dòng)較小的方案推進(jìn),整體方案具備輕量化的優(yōu)勢(shì),開發(fā)周期短,過(guò)程交互簡(jiǎn)單。
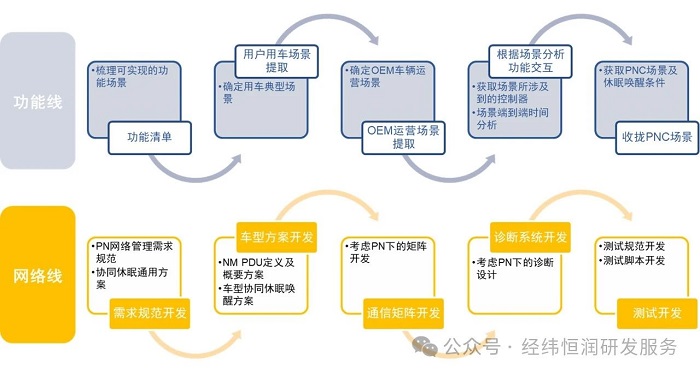
本文重點(diǎn)介紹下逆向開發(fā)的關(guān)鍵步驟:
· 第一步:PN場(chǎng)景設(shè)計(jì)及梳理
結(jié)合整車的功能列表、用車人典型的用車場(chǎng)景及OEM考慮的其他場(chǎng)景,確定車型需開發(fā)的場(chǎng)景范圍,比如全部喚醒、防盜、遠(yuǎn)控、充電等。場(chǎng)景開發(fā)應(yīng)考慮場(chǎng)景觸發(fā)的頻率、給用車客戶帶來(lái)的收益以及OEM本身的收益。
· 第二步:PN開發(fā)基礎(chǔ)原則確定
結(jié)合當(dāng)前量產(chǎn)車型的EE架構(gòu),確定一個(gè)基礎(chǔ)的PN開發(fā)規(guī)則,比如開發(fā)全局PN還是部分PN以及基礎(chǔ)的功能鏈路,形成本次開發(fā)的基礎(chǔ)原則文件,輸出到后續(xù)步驟。
· 第三步:PN場(chǎng)景功能鏈路梳理及分析
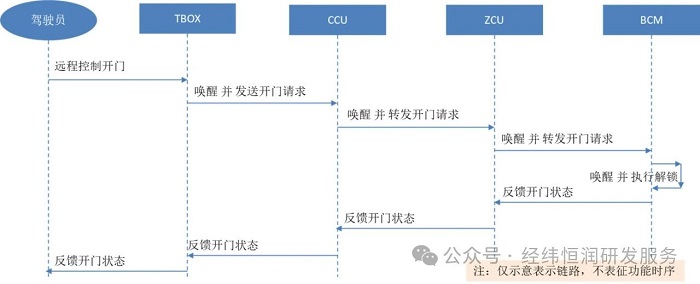
根據(jù)確定的功能場(chǎng)景及PN開發(fā)基礎(chǔ)原則及整車所有的子系統(tǒng)功能規(guī)范輸入,梳理場(chǎng)景觸發(fā)后的完整功能鏈路,這其中要切實(shí)考慮鏈路中涉及到的ECU、關(guān)鍵信號(hào)值的變化、功能執(zhí)行前提條件、存儲(chǔ)值/實(shí)時(shí)值需求、以太網(wǎng)接口調(diào)用需求、供電需求、網(wǎng)段需求等關(guān)鍵信息,通過(guò)細(xì)致的方案設(shè)計(jì)來(lái)避免場(chǎng)景上的鏈路缺失和場(chǎng)景間的關(guān)聯(lián);另外還需要考慮休眠釋放條件,防止場(chǎng)景的休眠異常。
· 第四步:網(wǎng)絡(luò)線的所有工作
在功能線開發(fā)的同時(shí),網(wǎng)絡(luò)線可同步開發(fā)相關(guān)的PN需求規(guī)范及休眠喚醒策略;在制定好PN場(chǎng)景后,可以開始NMPDU的制定、車型網(wǎng)絡(luò)相關(guān)方案的制定;PN的通信設(shè)計(jì)和診斷設(shè)計(jì)應(yīng)結(jié)合PN開發(fā)的基礎(chǔ)原則及網(wǎng)絡(luò)需求規(guī)范開展,比如通信設(shè)計(jì)是否要考慮應(yīng)用報(bào)文與場(chǎng)景的關(guān)聯(lián)、診斷設(shè)計(jì)是否要考慮全工況下的DTC記錄等。
· 第五步:功能及網(wǎng)絡(luò)的測(cè)試驗(yàn)證
結(jié)合上述開發(fā)的輸入,開展測(cè)試工作以驗(yàn)證符合性。
以上的每個(gè)步驟都需要形成相關(guān)的輸入輸出來(lái)保證整個(gè)方案體系的一致性,如相關(guān)模板、PN開發(fā)基礎(chǔ)原則、場(chǎng)景功能鏈路方案、控制器PN方案、網(wǎng)絡(luò)需求規(guī)范、休眠喚醒條件、測(cè)試規(guī)范/用例、測(cè)試腳本等等。此外,控制器的實(shí)現(xiàn)如基于AUTOSAR CP協(xié)議棧,需要同步考慮功能需求與BSW的Mapping關(guān)系,保證功能需求的落地可行性。
下圖即為同一個(gè)網(wǎng)段下不同控制器的喚醒示意。當(dāng)某PN場(chǎng)景觸發(fā)后,控制器置位相關(guān)的PN信息,其他控制器根據(jù)置位的PN信息來(lái)決定是否與自身相關(guān),如相關(guān)則喚醒以支撐功能實(shí)現(xiàn),如不相關(guān)則維持在低功耗狀態(tài)。
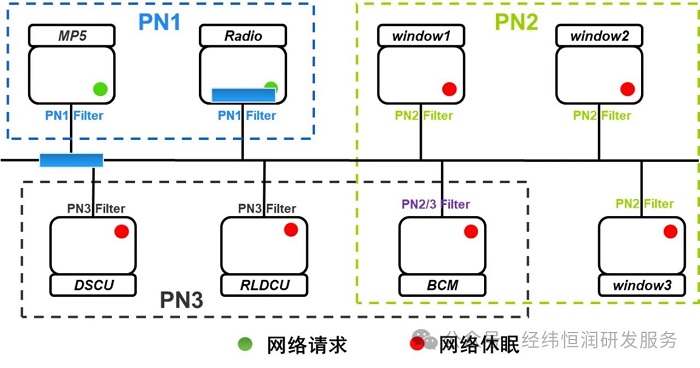
注:本文集中在CAN總線的局部網(wǎng)絡(luò)管理。
· 硬件支持
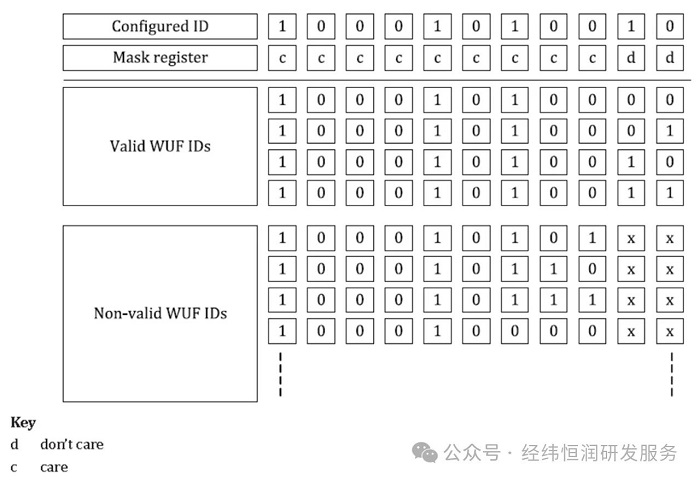
實(shí)現(xiàn)PN的控制器應(yīng)結(jié)合實(shí)際方案決定是否需要在硬件層面支持報(bào)文過(guò)濾功能,常見的支持硬件過(guò)濾功能的CAN收發(fā)器為NXP TJA1145,其在硬件層面設(shè)計(jì)了符合ISO 11898-2中Selective Wake-up的特性,可過(guò)濾自身關(guān)心的報(bào)文。通過(guò)使用此類收發(fā)器,可以達(dá)成控制器的功耗控制,否則無(wú)法實(shí)現(xiàn)功耗上的按需控制。
· 軟件支持
PN功能的實(shí)現(xiàn),使用AUTOSAR CP協(xié)議棧是非常方便的,與常規(guī)的NM相比,PN軟件模塊主要集中在BSW的ComM和CanNM中,ComM負(fù)責(zé)PNC狀態(tài)機(jī)的監(jiān)控及跳轉(zhuǎn),CanNM配合ComM負(fù)責(zé)NMPDU和CAN通道的維持和釋放,基于AUTOSAR軟件配置工具可以快速切換為支持PN。如使用手寫代碼,鑒于PN狀態(tài)機(jī)的規(guī)則相對(duì)簡(jiǎn)單易懂,也可以方便的實(shí)現(xiàn)此類功能。
經(jīng)緯恒潤(rùn)依托自身豐富的技術(shù)積淀,結(jié)合架構(gòu)開發(fā)、總線開發(fā)、嵌入式開發(fā)等綜合經(jīng)驗(yàn),對(duì)整車功能進(jìn)行分析與梳理,形成了一套邏輯嚴(yán)密、場(chǎng)景適應(yīng)性強(qiáng)的從場(chǎng)景-功能-控制器-自動(dòng)化測(cè)試系統(tǒng)的綜合解決方案框架。該方案包含了對(duì)市場(chǎng)需求的深刻理解,已應(yīng)用于多家OEM的實(shí)際車型開發(fā)中。
基于此綜合解決方案,針對(duì)OEM不同車型的獨(dú)特性、現(xiàn)有功能配置及軟硬件實(shí)際情況,細(xì)心規(guī)劃并執(zhí)行定制化實(shí)施方案,贏得了合作伙伴的廣泛信賴與深度認(rèn)可。
