在之前的文章中,我們介紹了IEEE 802.3cz[1]協議,MultiGABSE-AU物理層中XMII、PCS子層以及兩個可選功能的相關內容,本篇將介紹MultiGABSE-AU物理層PMA子層及PMD子層的相關機制。
PMA子層
PMA子層位于PCS子層和PMD子層之間,規范中定義了PMA子層的三個功能:PMA Transmit、PMA Receive及PHY Control。
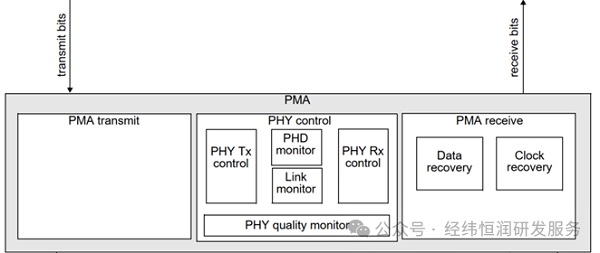
· PMA Transmit功能
PMA Transmit功能依賴于PHY的分組參數G,接收到PCS傳輸下來的數據后,PMA Transmit會按照下圖中的方案,將比特映射為對應的符號。
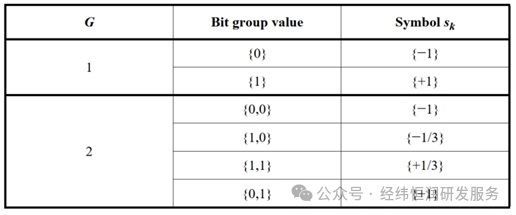
當G=1時,Transmit Block會被映射為195840個獨立小組,對應符號{-1}和{+1}。
當G=2時,Transmit Block會被映射為97920個2bit小組,對應符號{-1},{-1/3},{+1/3}和{+1}。
· PMA Receive功能
PMA Receive的功能包括了Transmit Block的同步以及從PMD Receive中恢復時鐘和數據。
PMA Receive的時鐘恢復包含粗定時恢復,時鐘頻率偏差估計以及精細時鐘恢復三個過程:粗定時恢復用于與接收Transmit Block的起始進行同步,精細時鐘恢復用于輸出穩定的恢復時鐘,可通過這個時鐘從PMD傳輸的信號中采樣并接收符號數據。符號數據會通過上圖的方案,映射為Bit Group發送給PCS Receive。
· PHY Control功能
PHY Control包含了五個模塊:PHY Tx Control、PHY Rx Control、PHD monitor、Link monitor以及PHY quality monitor,五個模塊共同定義了從初始化到穩定傳輸信號之間,PHY需要進行的工作。以下是五個模塊主要功能的介紹。
? PHY Tx control:數據發送控制
? PHY Rx control:時鐘恢復、數據接收
? PHD monitor:PHD恢復、解析及完整性檢查
? Link monitor:link狀態檢測
? PHY quality monitor:通信質量檢測
為了更好地理解PHY Control的整體功能,接下來會將五個模塊整合起來,通過上電后的流程進行簡要介紹,要注意的是,相同序號的步驟并不一定在同一時刻發生。
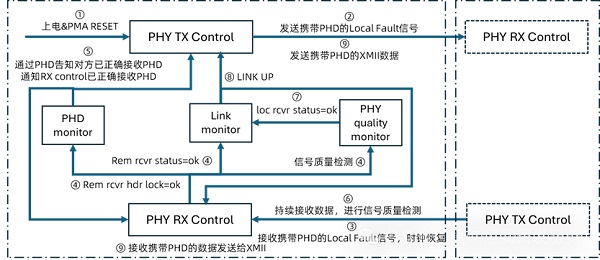
① 系統上電,PMA子層Reset,所有模塊進入初始化階段。
② 初始化完成后,PHY Tx control模塊開始發送數據,由于此時還沒有Link up,發送的數據并不是payload數據,而是一種特殊的65B控制信號:Local Fault,在正式收到link up信號前,PHY Tx control模塊會持續發送攜帶PHD的Local Fault信號。
③ 在發送Local Fault信號的同時,鏈路伙伴也完成了上述步驟,開始發送該信號,因此,PHY Rx control模塊會接收攜帶了PHD的Local Fault信號,并進行時鐘恢復。
④ 針對收集的數據,解析后得到PHD和Payload兩部分,Payload會在PHY quality monitor模塊中持續檢測基于符號噪聲方差估計的Link Margin,這是一個持續檢測的過程。PHD則是在進行CRC16校驗后,讀取PHD中LINKSTATUS和HDRSTATUS的值,分別輸入給Link monitor模塊和PHD monitor模塊,這一步驟的目的是通過檢測PHD獲取對方接收Payload和PHD的狀態,對方接收到步驟2發出的數據后也會進行步驟四的分析,并將結論寫入PHD發送至本地的PHY Rx control模塊。
⑤ 與此同時,CRC校驗后,PHD monitor模塊還會將結果寫入本地的HDRSTATUS參數中,通知發送和接收模塊以正確接收PHD,這個結果也會通過PHD告知鏈路伙伴。
⑥ 接下來,PHY Rx control模塊會持續接收多條數據用于PHY quality monitor模塊的鏈路余量估計,至少一次Link Margin大于0可認為本地接收狀態通過。
⑦ 檢測到本地接收狀態通過后,PHY quality monitor模塊會將這個結果通知Link monitor模塊。
⑧ Link monitor模塊根據步驟4和步驟7輸出的遠程和本地接收狀態,二者均為OK則進入Link UP狀態,要注意的是,只有二者均為OK才可以進入Link UP狀態,其中一個出現問題會退出Link UP。
⑨ Link up后,PHY Tx control模塊會確認TX.NEXT.MODE,如果是normal transmission模式則開始發送XMII上下發的Payload數據,PHY Rx control模塊開始接收對方發送的Payload數據,進入正常工作模式。
PMD子層
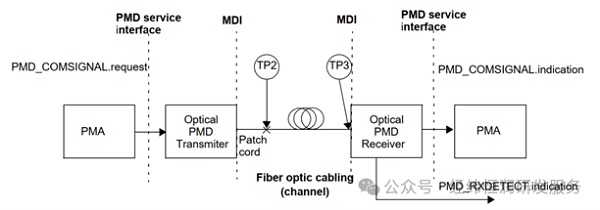
PMD子層全稱Physical Medium Dependent,位置在PMA子層和傳輸介質之間,主要功能是光信號與電信號的轉換,802.3cz中定義了PMD子層的三個功能:PMD Transmit、PMD Receive以及PMD signal detect。
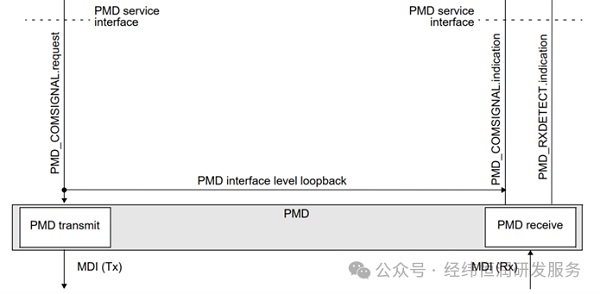
PMD Transmit與PMD Receive的功能比較簡單,PMD Transmit接收到PMA Transmit發送的符號后,會根據TP2節點的平均光功率進行符號到發射功率的計算。PMD Receive收到光信號后同樣會根據接收到的光功率反向計算出符號發送至PMA Receive。
輸出光功率的計算公式如下:

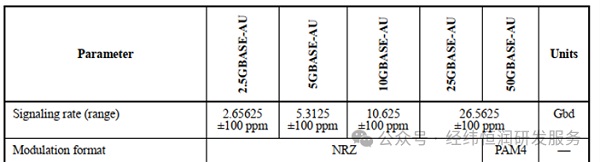
PMD 發射機的信號速率及調制方式如下圖所示:
PMD signal detect功能是在PMD Receive端運行的功能,其作用是通過檢測TP3處的平均光功率確認是否收到光信號,判斷條件如下圖所示:
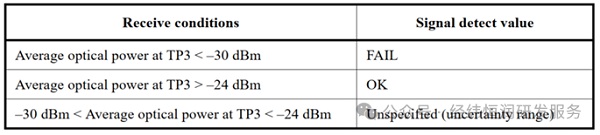
Signal detect為FAIL表示沒有收到光信號,無法發起鏈路建立,因此在啟用EEE功能時,PMD signal detect功能可用于將系統由正常狀態轉變為EEE狀態。
除此之外,803cz在PMD的章節中還提出了對傳輸介質的需求:
· MultiGBASE-AU在傳輸介質上需要采用50/125 μm 的OM3規格多模光纖
· 光纖中心波長范圍為970-990nm
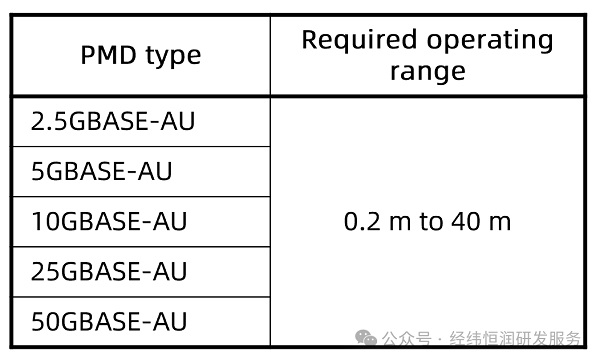
· 光纖傳輸距離如下圖所示,但規范中同樣提到,當滿足所有光學規格的情況下,超過規定長度的PMD是合規的
結語
以上便是介紹的MultiGBASE-AU物理層的全部內容,主要包括了XMII、PCS子層、PMA子層及PMD子層四大板塊的內容。隨著車載領域對于高帶寬、低延遲、低電磁干擾的需求,光通信和MultiGBASE-AU成為可供選擇的車載通信新技術,帶來更多的創新和進步的同時,也帶來了更大的挑戰。
經緯恒潤作為OPEN聯盟會員和AUTOSAR聯盟的高級合作伙伴,長期為國內外各大OEM和供應商提供涵蓋TCP/IP、SOME/IP、DoIP、AVB、TSN、DDS等技術領域的設計和測試咨詢服務,積極研發和探索車載網絡前沿技術的工程應用。通過多個項目的實踐經驗,已建立了高質量、本土化的設計與測試一體化解決方案,為整車網絡架構提供可靠支持。
參考文獻
[1] IEEE, 802.3cz-2023, " IEEE Standard for Ethernet, Amendment 7: Physical Layer Specifications and Management Parameters for Multi‐Gigabit Glass Optical Fiber Automotive Ethernet ", 2023.
