各種機器人特點及應(yīng)用簡介
作者:李剛
職務(wù):沈陽萊茵機電有限公司總經(jīng)理
電話:024- 25369850
傳真:024-25817012
網(wǎng)址:www.germanytek.com
郵箱: sbg-robotic@163.com
產(chǎn)品:德國BergerLahr公司和Roboworker公司中國總代理
一 機器人的定義及分類:
機器人按ISO 8373定義為:位置可以固定或移動,能夠?qū)崿F(xiàn)自動控制、可重復(fù)編程、多功能多用處、末端操作器的位置要在3個或3個以上自由度內(nèi)可編程的工業(yè)自動化設(shè)備。這里自由度就是指可運動或轉(zhuǎn)動的軸。工業(yè)機器人按其結(jié)構(gòu)形式及編程坐標系主要分類為關(guān)節(jié)型機器人、移動機器人、水下機器人和直角坐標機器人等。按主要功能特征及應(yīng)用分為移動機器人、水下機器人、潔凈機器人、直角坐標機器人、焊接機器人、手術(shù)機器人和軍用機器人等。機器人學(xué)涉及到機器人結(jié)構(gòu),機器人視覺,機器人運動規(guī)劃,機器人傳感器,機器人通訊和人工智能等許多方面,不同用處的機器人涉及到不同的學(xué)科,下面僅對這些機器人的結(jié)構(gòu)和應(yīng)用進行簡單介紹:
二 關(guān)節(jié)型機器人
關(guān)節(jié)型機器人的結(jié)構(gòu)類同人的手臂,由幾個轉(zhuǎn)動軸,擺動軸和手爪等6~7個自由度組成。生產(chǎn)廠家主要有德國Manutec公司,德國KUKA,德國REIS,日本Motorman,日本Yaskawa和沈陽新松等。關(guān)節(jié)型機器人的轉(zhuǎn)動軸和擺動軸主要用伺服電機配幾乎沒有反向間隙的精密減速機或直驅(qū)力矩電機驅(qū)動,而其控制系統(tǒng)其難度也很大。各個廠家的關(guān)節(jié)型機器人其結(jié)構(gòu)類同,主要差別在技術(shù)參數(shù),下面以德國Manutec公司的關(guān)節(jié)型機器人為例介紹。
圖1是Manutec公司型號為r15-30的 6 自由度通用關(guān)節(jié)機器人,額定負載30公斤,最大可達到 75 公斤,工作半徑1.3 米,重復(fù)定位精度小于0.04 mm ,點到點的最大運行速度高達 5.9 m/s,加速度高達23 m/s2和工作壽命20 年。可以坐立式安裝,可以是掉掛式安裝,也可以與水平面小于30度角的斜式安裝,不影響其各項技術(shù)指標。r15可以選配防爆式的,也可以選配一級潔凈式等。
r15-30主要特點是強度大剛性好和重復(fù)定位精度高,主要應(yīng)用領(lǐng)域是其它廠家的關(guān)節(jié)型機器人由于剛性和精度不夠無法應(yīng)用的領(lǐng)域,而用 5 軸加工中心成本太高或無法勝任的工作。如磨齒,異形銑削,殼(腔)內(nèi)部銑削,磨,拋,切割和焊接等。
在手爪末端可以配力傳感器,來加工異形表面(如銑削,磨和拋)。一個機器人也可以與雙工作臺及各種的雙旋轉(zhuǎn)軸協(xié)調(diào)同步運動。也可以是兩個機器人協(xié)調(diào)同步工作,如一臺機器人抓取工件,而令一臺機器人對該工件進行加工,兩臺機器人同步協(xié)調(diào)完成特定的加工軌跡。
其它廠家的關(guān)節(jié)機器人主要應(yīng)用在汽車焊接和裝配等任務(wù)中。關(guān)節(jié)型機器人的優(yōu)點是可以從不同角度不同方位來工作,速度快,工作效率高。但主要缺點是工作半徑小,負載小,價格高,應(yīng)用難度大和維護費用高。
作為關(guān)節(jié)機器人的簡化型機器人SCARA就是兩個擺動軸和一個上下運動軸,其特點是簡單,經(jīng)濟,適合工作空間小,負載小、高速搬運。但它的價位高于直角坐標機器人,應(yīng)用行業(yè)和數(shù)量非常小。
三 特種機器人
移動機器人就是能自主移動或上下樓梯的電動車,主要用于生產(chǎn)現(xiàn)場貨物的自主運輸和排險作業(yè),或進入有污染和放射的環(huán)境內(nèi)取樣及監(jiān)視等。還有一些移動機器人就是仿造一些動物,用腿和爪行走路的行走機器人,如美國的軍用狗,還處于適用階段。水下機器人與潛艇能自主潛入水下完成對海上鉆井平臺的水下建筑、發(fā)電站的水下閘門、海底打撈等工程的錄像和監(jiān)控。潔凈式機器人主要是穿上防護衣的關(guān)節(jié)型機器人,使其自身有良好的密封性,不把灰塵帶入工作現(xiàn)場,自身也不會產(chǎn)生灰塵,他們主要應(yīng)用于電子器件,食品和藥品等生產(chǎn)中。國際對潔凈機器人的潔凈度有明確的定義。軍用機器人主要是小型移動車,遙控飛機或電子狗等,他們完成危險場所的一些作業(yè),如排雷,布雷,現(xiàn)場監(jiān)控,射擊摧毀特定目標等。盡管目前服務(wù)機器人主要是玩具式的自治電動車,在其上面裝有視覺和超聲等裝置使其可以在家里無碰撞移動,對不同位置進行照像,用來防盜,檢測煤汽泄露,無線發(fā)送信息和接收指令,運輸物品等等。但未來服務(wù)機器人的功能會不斷增強,不斷深入到人們?nèi)债a(chǎn)生活的各個方面。還有手術(shù)機器人,航天機器人,擠牛奶機器人和核電站專用機器人等專用機器人。
四 直角坐標機器人
作為在各行各業(yè)中最廣泛應(yīng)用的直角坐標機器人,它主要是以直線運動軸為主,各個運動軸通常對應(yīng)直角坐標系中的X軸,Y軸和Z軸,一般X軸和Y軸是水平面內(nèi)運動軸,Z軸是上下運動軸。在一些應(yīng)用中Z軸上帶有一個旋轉(zhuǎn)軸,或帶有一個擺動軸和一個旋轉(zhuǎn)軸。在絕大多數(shù)情況下直角坐標機器人的各個直線運動軸間的夾角為直角。
4.1直角坐標機器人的組成
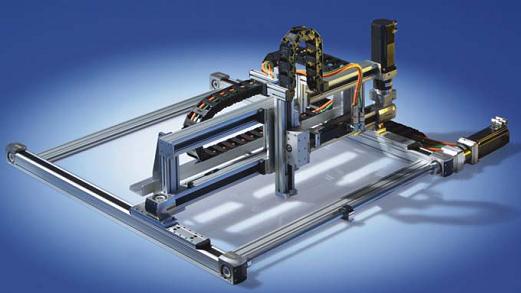
圖2是一個典型的3D直角坐標機器人,它由X軸,Y軸,Z軸及驅(qū)動電機組成。此外一個完整的機器人系統(tǒng)還需要控制系統(tǒng)和手抓,下面分別予以介紹:
4.1.1直線運動軸: 也叫直線運動單元,它就是一個獨立的運動軸,主要由支撐載體的鋁型 材或鋼型材和被安裝在型材內(nèi)部的直線導(dǎo)軌、運動滑塊以及作為帶動滑塊做高速運動的同步帶組成。
4.1.2運動軸的驅(qū)動系統(tǒng)
直角坐標機器人的傳動主要是通過驅(qū)動電機的轉(zhuǎn)動帶動同步帶運動,同步帶帶動直線導(dǎo)軌上的滑塊運動。當(dāng)驅(qū)動軸的最高轉(zhuǎn)速低于600轉(zhuǎn)/分時通常選用步進電機,否則選用交流伺服電機。
4.1.3 直角坐標機器人的控制系統(tǒng)
機器人要在一定時間內(nèi)完成特定的任務(wù),比如每10秒內(nèi)完成一次搬運工作。在完成抓取,加速運動,高速運動,減速運動,釋放工件等同時,還要與相關(guān)的設(shè)備通過通訊或I/O口實現(xiàn)一些時序上的協(xié)調(diào)同步。另外在涂膠應(yīng)用上,各個運動軸要完成直線和圓弧插補運動。因此其數(shù)控系統(tǒng)要按具體應(yīng)用要求來選定其控制軸數(shù)、I/O口數(shù)量和軟件功能。通常選用數(shù)控系統(tǒng),PLC,工控機加運動控制卡和帶軸卡功能及I/O口的驅(qū)動電機來做控制系統(tǒng)。
4.1.4 直角坐標機器人的末端操作器——手爪系統(tǒng)
根據(jù)其具體應(yīng)用情況,其手爪系統(tǒng)可能是氣動吸盤、氣動夾取手爪、電動夾取手爪、電磁吸取手爪、焊槍、膠槍、專用工具和檢測儀器等。在很多場合可以一次抓取多個工件。
很多廠家已開發(fā)出一些標準的直線運動單元及其組合,下面結(jié)合德國百格拉公司的產(chǎn)品來介紹直角坐標機器人的技術(shù)數(shù)據(jù)及應(yīng)用。
4.2德國百格拉公司直角坐標機器人簡介
德國百格拉公司是世界上最著名的直角坐標機器人供應(yīng)商之一,生產(chǎn)多種規(guī)格的直線運動單元,步進電機,交流伺服電機,直線電機和多軸數(shù)控系統(tǒng)。以此為基礎(chǔ)在短時間內(nèi)可以提供各種規(guī)格的線性導(dǎo)軌、二維、三維標準機器人及用戶專用機器人和生產(chǎn)線。這些機器人可以裝備焊槍、各種通用手抓或?qū)S霉ぞ摺K鼈儼葱枰诙x好的3D空間內(nèi)可靠、精確和快速地定位,沿直線或圓弧插補運動。完成焊接、搬運和上下料、包裝、碼垛、拆垛、檢測、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴涂等一系列工作。由于所有部件全部自己生產(chǎn),使得機器人整體性能更加優(yōu)異。
4.2.1 龍門軸直線運動單元
直線運動單元和驅(qū)動電機固定不動,而滑塊運動,主要用于水平面和垂直面上長距離運動。有標準化產(chǎn)品PAS41,PAS42,PAS43和PAS44。對應(yīng)的橫截面尺寸是40*40 mm,60*60mm,80*80 mm和110*110mm,單根標準長度是6000 mm、負載是10~200公斤、重復(fù)定位精度0.05mm、最高運行速度8米/秒,加速度是每秒4米。
4.2.2 抓取軸直線運動單元
驅(qū)動電機和滑塊固定在一平面上,直線運動單元本體運動,其導(dǎo)軌標準長度可達2400 mm。主要以垂直或水平進入工作空間,用于貨物的抓取和搬運等。其標準化產(chǎn)品有LM-A001到LM-A808等,對應(yīng)的尺寸是40*40 mm,60*60mm,80*80 mm到110*110mm,單根最大長度是3000 mm、負載是2~100公斤、重復(fù)定位精度0.05mm、最高運行速度8米/秒,加速度是每秒4米。
4.2.3 各種結(jié)構(gòu)形式的2D和3D直角坐標機器人
利用標準的龍門式和抓取軸直線運動單元德國百格拉公司在過去的20多年中成功組合成了數(shù)百種結(jié)構(gòu)形式,不同行程和負載能力,不同安裝方式的機器人。其中針對不同應(yīng)用要求還采取了多種加強形式來保證其強度,提高其變形能力,減少震動和晃動,提高壽命等。其常用的結(jié)構(gòu)形式有龍門式,懸臂式,掛臂式和掉掛式等。
4.3 直角坐標機器人的主要結(jié)構(gòu)形式及主要特點
但針對各種不同的應(yīng)用,實際上可以方便快速組合成不同維數(shù),各種行程和不同帶載能力的壁掛式、懸臂式、龍門式或倒掛式等各種形式的直角坐標機器人。從簡單的二維機器人到復(fù)雜的五維機器人就有上百種結(jié)構(gòu)形式的成功應(yīng)用案例。從電機到汽車等各行各業(yè)的自動化生產(chǎn)線中,也是各式各樣的多臺直角坐標機器人和其它設(shè)備嚴格同步協(xié)調(diào)工作。可以說直角坐標機器人幾乎能勝任所有的工業(yè)自動化任務(wù)。下面是其主要特點:
4.3.1任意組合成各種樣式:每根直線運動軸最長是6米,其帶載能力從10公斤到200公斤。在實際應(yīng)用中已有近百種結(jié)構(gòu)的直角坐標機器人,這些結(jié)構(gòu)也可以任意組合成新的結(jié)構(gòu)等。
4.3.2 超大行程:因為單根龍門式直線運動單元的長度是6米,還可以多根方便地級連成超大行程,所以其工作空間幾乎沒有限制,小到手機點膠機,大到18米長行程的切割機,8米長行程鉆銑床,6米*6米*3米的檢測機器人等。超大行程時要采用直線導(dǎo)軌和齒條傳動方式。
4.3.3負載能力強:單根直線運動單元的負載通常小于200公斤。但當(dāng)采用雙滑塊或多滑塊剛性聯(lián)結(jié)時負載能力可以增加5到10倍。當(dāng)把兩根或四根直線運動單元并排接起來使用時,其負載可以增加2到4倍。當(dāng)采用多根多滑塊結(jié)構(gòu)時其負載能力可增加到數(shù)噸。
4.3.4高動態(tài)特性:輕負載時其最大運行速度可達到每秒8米,加速度可達到每秒4米。使其具有很高的動態(tài)特性,工作效率非常高,通常在幾秒內(nèi)完成一個工作節(jié)拍。
4.3.5高精度:按傳動方式及配置在整個行程內(nèi)其重復(fù)定位精度可達到0.05mm~0.01mm。
4.3.6擴展能力強:可以方便改變結(jié)構(gòu)或通過編程來適合新的應(yīng)用。
4.3.7簡單經(jīng)濟:對比關(guān)節(jié)機器人,直角坐標機器人不僅外觀直觀且構(gòu)造成本低,編程簡單類同數(shù)控銑床,易培訓(xùn)員工和維修,使其具有非常好的經(jīng)濟性。
4.3.8勝任復(fù)雜任務(wù):采用帶有RTCP功能的五軸或五軸以上數(shù)控系統(tǒng)能完成非常復(fù)雜的噴涂,噴丸,檢測,加工等任務(wù)。
4.3.9壽命長:直角坐標機器人的壽命一般是10年以上,維護好了可達20年。
4.3.10應(yīng)用范圍廣:可以方便地裝配多種形式和尺寸的手爪,可以勝任許多常見的工作,如焊接、切割,搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼和噴涂等任務(wù)。
4.4 直角坐標機器人的選型和保養(yǎng)
4.4.1選型: 首先要根據(jù)負載大小,行程,工作節(jié)拍和工作空間的限制來選擇機器人的外形結(jié)構(gòu)。選好結(jié)構(gòu)形式后要根據(jù)行程和變形量等選擇每個軸的形式和型號。大負載和高沖擊力時可以選擇由2根或4根運動軸組合成一個復(fù)合運動軸。各個運動軸間的裝配也很關(guān)鍵,不僅要保證其垂直度,更要考慮在各個方向有足夠的抗沖擊力和變形。機器人要在幾秒內(nèi)完成一個運動節(jié)拍,選擇的驅(qū)動電機必須有足夠的驅(qū)動力,通常要比理論計算值高出100%。當(dāng)負載的轉(zhuǎn)動慣量與驅(qū)動電機的轉(zhuǎn)動慣量之比大于12時,要選配德國紐卡特公司的精密行星減速機。
在超高動態(tài)和定位精度要求很高情況下,可以選用直線電機來驅(qū)動。但直線電機的安裝和防護難度大,發(fā)熱量大,撞擊危險性高和控制難度高,成本也高,所以要慎用。而其防護難度大和發(fā)熱量大目前在機床行業(yè)還是世界性難題。
4.4.2 安裝
機器人在加速和減速時會產(chǎn)生強大的沖擊力,而且通常每天要工作24小時,所以機器人必須被牢固地安裝在支架上。機器人的支架要有足夠的抗沖擊力,要有地腳,以保證在長期高速高動態(tài)運動沖擊下,沒有任何晃動。此外在安裝時要保證運動軸間的平行度、平面度和垂直度。
4.4.3 保養(yǎng)事項
通常機器人的每個運動軸在經(jīng)過一定長度的運動后要周期性的通過滑塊的注油孔給直線導(dǎo)軌加注潤滑油。根據(jù)機器人使用環(huán)境的不同和工作速度不同,其注油的周期也不同。在食品和玻璃切割等行業(yè)要選用帶防塵帶的運動軸和縮短注油周期,在有噴水的場合也要縮短注油周期。
五,應(yīng)用和展望
每種機器人都有其特殊性和優(yōu)勢,適用特定的行業(yè)或作業(yè)。也有把關(guān)節(jié)機器人安裝在大的直線運動平臺上來擴大工作區(qū)域和完成更多的任務(wù)。為了克服直角坐標機器人不易深入細長空間區(qū)域內(nèi)工作,德國百格拉公司成功組合成了多種結(jié)構(gòu)的懸臂式直角坐標機器人及在直角坐標機器人的Z軸上加上500mm的擺動軸和上下升降軸,有時還在Z軸上加上一個轉(zhuǎn)動軸和擺動軸構(gòu)成5軸機器人,還把不同結(jié)構(gòu)形式的直角坐標機器人組合成多種集抓取,搬運,處理和最后抓取運走功能于一體的機器人工作中心。在德國就有大大小小50多家直角坐標機器人生產(chǎn)企業(yè),他們20多年的努力使得直角坐標機器人比關(guān)節(jié)式機器人有更廣泛的應(yīng)用。例如在西方發(fā)達國家被廣泛用來執(zhí)行焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、涂膠和切割等一系列工作。深受包裝機械、印刷機械、汽車工業(yè)、食品生產(chǎn)工業(yè)、藥品生產(chǎn)工業(yè)、電子工業(yè)、機器制造業(yè)和化妝品生產(chǎn)等行業(yè)的好評。隨著自動化程度、環(huán)保要求、衛(wèi)生規(guī)定、生產(chǎn)效率、人員素質(zhì)和人工費用的提高,直角坐標機器人在中國也必將被各行各業(yè)廣泛采用。