直角坐標機器人簡述
作者:李剛
職務:沈陽萊茵機電有限公司總經(jīng)理
電話:024-25817009/25369850
傳真:024-25817012
網(wǎng)址:www.germanytek.com
郵箱:25817009@163.com
產(chǎn)品:德國BergerLahr公司和Roboworker公司中國總代理
一 機器人的定義及分類:
機器人按ISO 8373定義為:位置可以固定或移動,能夠?qū)崿F(xiàn)自動控制、可重復編程、多功能多用處、末端操作器的位置要在3個或3個以上自由度內(nèi)可編程的工業(yè)自動化設備。這里自由度就是指可運動或轉(zhuǎn)動的軸。工業(yè)機器人按其結(jié)構形式及編程坐標系主要分類為關節(jié)型機器人、移動機器人、水下機器人和直角坐標機器人等。按主要功能特征及應用分類為移動機器人、水下機器人、潔凈機器人、直角坐標機器人、焊接機器人、手術機器人和軍用機器人等。
作為在各行各業(yè)中被廣泛應用直角坐標機器人主要是以直線運動軸為主,各個運動軸通常對應直角坐標系中的X軸,Y軸和Z軸,一般X軸和Y軸是水平面內(nèi)運動軸,Z軸是上下運動軸。在一些應用中Z軸上帶有一個旋轉(zhuǎn)軸,或帶有一個擺動軸和一個旋轉(zhuǎn)軸。在絕大多數(shù)情況下直角坐標機器人的各個直線運動軸間的夾角為直角。
二 直角坐標機器人的主要組成部分
下圖是一個典型的3D直角坐標機器人,它由X軸,Y軸,Z軸及驅(qū)動電機組成。此
外一個完整的機器人系統(tǒng)還需要控制系統(tǒng)和手抓,下面分別予以介紹: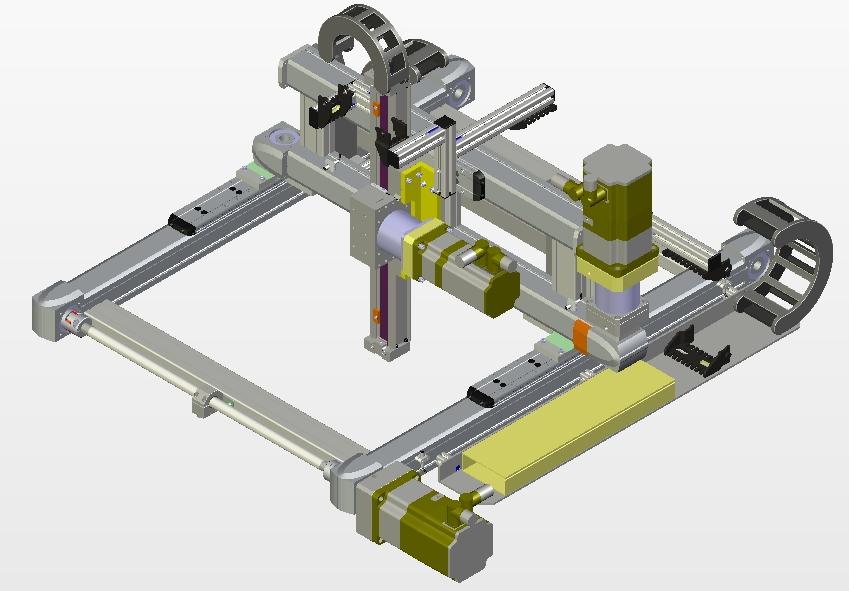
2.1 直線運動軸: 也叫直線運動單元,它就是一個獨立的運動軸,主要由支撐載體的鋁型材或鋼型材和被安裝在型材內(nèi)部的直線導軌、運動滑塊以及作為帶動滑塊做高速運動的同步帶組成。
2.2運動軸的驅(qū)動系統(tǒng)
直角坐標機器人的傳動主要是通過驅(qū)動電機的轉(zhuǎn)動帶動同步帶運動,同步帶帶動直線導軌上的滑塊運動。當驅(qū)動軸的最高轉(zhuǎn)速低于600轉(zhuǎn)/分時通常選用步進電機,否則選用交流伺服電機。
2.3直角坐標機器人的控制系統(tǒng)
機器人要在一定時間內(nèi)完成特定的任務,比如每10秒內(nèi)完成一次搬運工作。在完成抓取,加速運動,高速運動,減速運動,釋放工件等同時,還要與相關的設備通過通訊或I/O口實現(xiàn)一些時序上的協(xié)調(diào)同步。另外在涂膠應用上,各個運動軸要完成直線和圓弧插補運動。因此其數(shù)控系統(tǒng)要按具體應用要求來選定其控制軸數(shù)、I/O口數(shù)量和軟件功能。通常選用數(shù)控系統(tǒng),PLC,工控機加運動控制卡和帶軸卡功能及I/O口的驅(qū)動電機來做控制系統(tǒng)。
2.4直角坐標機器人的末端操作器——手爪系統(tǒng)
根據(jù)其具體應用情況,其手爪系統(tǒng)可能是氣動吸盤、氣動夾取手爪、電動夾取手爪、電磁吸取手爪、焊槍、膠槍、專用工具和檢測儀器等。在很多場合可以一次抓取多個工件。
三 直角坐標機器人的主要結(jié)構形式及主要特點
上圖是典型的3D龍門式直角坐標機器人。但針對各種不同的應用,實際上可以方便快速組合成不同維數(shù),各種行程和不同帶載能力的壁掛式、懸臂式、龍門式或倒掛式等各種形式的直角坐標機器人。從簡單的二維機器人到復雜的五維機器人就有上百種結(jié)構形式的成功應用案例。從電機到汽車等各行各業(yè)的自動化生產(chǎn)線中,更是各式各樣的多臺直角坐標機器人和其它設備嚴格同步協(xié)調(diào)工作。可以說直角坐標機器人幾乎能勝任所有的工業(yè)自動化任務。下面是其主要特點:
3.1任意組合成各種樣式:每根直線運動軸最長是6米,其帶載能力從10公斤到200公斤。在實際應用中已有近百種結(jié)構的直角坐標機器人,這些結(jié)構也可以任意組合成新的結(jié)構等。
3.2超大行程:因為單根龍門式直線運動單元的長度是6米,還可以多根方便地級連成超大行程,所以其工作空間幾乎沒有限制,小到手機點膠機,大到18米長行程的切割機,8米長行程鉆銑床,6米*6米*3米的檢測機器人等。超大行程時要采用直線導軌和齒條傳動方式。
3.3負載能力強:單根直線運動單元的負載通常小于200公斤。但當采用雙滑塊或多滑塊剛性聯(lián)結(jié)時負載能力可以增加5到10倍。當把兩根或四根直線運動單元并排接起來使用時,其負載可以增加2到4倍。當采用多根多滑塊結(jié)構時其負載能力可增加到數(shù)噸。
3.4高動態(tài)特性:輕負載時其最大運行速度可達到每秒8米,加速度可達到每秒4米。使其具有很高的動態(tài)特性,工作效率非常高,通常在幾秒內(nèi)完成一個工作節(jié)拍。
3.5高精度:按傳動方式及配置在整個行程內(nèi)其重復定位精度可達到0.05mm到0.01mm。
3.6擴展能力強:可以方便改變結(jié)構或通過編程來適合新的應用。
3.7簡單經(jīng)濟:對比關節(jié)機器人,直角坐標機器人不僅外觀直觀且構造成本低,編程簡單類同數(shù)控銑床,易培訓員工和維修,使其具有非常好的經(jīng)濟性。
3.8勝任復雜任務:采用帶有RTCP功能的五軸或五軸以上數(shù)控系統(tǒng)能完成非常復雜的噴涂,噴丸,檢測,加工等任務。
3.9壽命長:直角坐標機器人的維護通常就是周期性加注潤滑油,壽命一般是10年以上,維護好了可達20年。
3.10應用面寬:可以方便地裝配多種形式和尺寸的手爪,可以勝任許多常見的工作,如焊接、切割,搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼和噴涂等任務。
四、直角坐標機器人的選型和保養(yǎng)
4.1選型: 首先要根據(jù)負載大小,行程,工作節(jié)拍和工作空間限制來選擇機器人的外形結(jié)構。選好結(jié)構形式后要根據(jù)行程和變形量等選擇每個軸的形式和型號。大負載時和高沖擊力時可以選擇由2根或4根運動軸組合成一個復合運動軸。各個運動軸間的裝配也很關鍵,不僅要保證其垂直度,更要考慮在各個方向有足夠的抗沖擊力和變形。機器人要在幾秒內(nèi)完成一個運動節(jié)拍,選擇的驅(qū)動電機必須有足夠的驅(qū)動力,通常要比理論計算值高出100%。當負載的轉(zhuǎn)動慣量與驅(qū)動電機的轉(zhuǎn)動慣量比大于12時,要選配德國紐卡特公司的精密行星減速機。
在超高動態(tài)和定位精度要求很高情況下,可以選用直線電機來驅(qū)動。但直線電機的安裝和防護難度大,發(fā)熱量大,撞擊危險性高和控制難度高,成本也高,所以要慎用。而其防護難度大和發(fā)熱量大目前在機床行業(yè)還是世界性難題。
4.2安裝
機器人在加速和減速時會產(chǎn)生強大的沖擊力,而且通常每天要工作24小時,所以機器人必須被牢固地安裝在支架上。機器人的支架要有足夠的抗沖擊力,要有地腳,以保證在長期高速高動態(tài)運動沖擊下,沒有任何晃動。此外在安裝時要保證運動軸間的平行度、平面度和垂直度。
4.3保養(yǎng)事項
通常機器人的每個運動軸在經(jīng)過一定長度的運動后要周期性的通過滑塊的注油孔給直線導軌加注潤滑油。隨機器人使用環(huán)境的不同和工作速度不同,其注油的周期也不同。在食品和玻璃切割等行業(yè)要選用帶防塵帶的運動軸和縮短注油周期,在有噴水的場合也要縮短注油周期。
五,應用和展望
直角坐標機器人以其特有的一些優(yōu)點在西方國家被廣泛用來執(zhí)行焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、涂膠和切割等一系列工作。深受包裝機械、印刷機械、汽車工業(yè)、食品生產(chǎn)工業(yè)、藥品生產(chǎn)工業(yè)、電子工業(yè)、機器制造業(yè)和化妝品生產(chǎn)等行業(yè)的好評。隨著自動化程度、環(huán)保要求、衛(wèi)生規(guī)定、生產(chǎn)效率和人工費用的提高,直角坐標機器人在中國也必將被各行各業(yè)廣泛采用。
