摘要: 提出了一種基于可編程計算機控制器(PCC) 的測頻測相方法, 并用于發電機調速器的機組頻率、電網頻率及其相位差的測量, 研制了相應裝置, 與傳統的單片機測頻測相裝置相比, 其硬件電路大為簡化, 測頻測相裝置的可靠性極大提高, 而且測頻精度和動態品質也較高。
關鍵詞: 發電機調速器; 頻率相位測量; 可編程計算機控制器
目前發電機微機調速器頻率與相位測量裝置一般均采用單片機實現, 其硬件為自制件, 且各廠家均為小批量生產, 故元件檢測、篩選、老化處理、焊接及生產工藝等都受到限制, 致使頻率與相位測量環節可靠性較低, 甚至運行中還可能出現單片機死機, 使頻率與相位測量環節失靈, 從而使調速器整機的可靠性大大降低, 嚴重影響調速器的安全可靠運行。本文提出一種基于可編程計算機控制器(PCC) 的發電機調速器頻率與相位測量裝置, 克服了單片機頻率與相位測量裝置的缺點與不足。
1 PCC 及時間處理單元(TPU)
可編程邏輯控制器(PLC) 從誕生以來, 不斷吸收微電子和微機技術的最新成果, 發展十分迅速。1994年奧地利B&R 公司提出了"可編程計算機控制器(Programmable Computer Controller, PCC) "的概念, 將計算機的多任務分時操作系統及高級編程語言引入可編程計算機控制器, 從而使PCC 既具有PLC 的高可靠性又具有計算機的快速、多任務和編程通用化的特點。本頻率相位測量裝置就是采用奧地利B&R 公司可編程計算機控制器2003系列的模塊CP474作為基本單元, 選用32 位MotorolaM 68300微處理器作為其CPU。該微處理器有一個時間處理單元(TPU ) , 主要用于外部處理事件計數、門電平時間測量、頻率測量、脈寬調制等與時間有關的任務( tim ing tasks) , 減少CPU 模塊為處理這些任務調用中斷服務程序所占用的時間。時間處理單元的結構框圖如圖1所示。TPU 由處理器、中斷寄存器、接口寄存器(RAM )、定時器TCR1及TCR2與輸入輸出通道等組成。TPU 由接口寄存器組通過1MB 的內部總線與CPU 通信, 接口寄存器組包括系統配置寄存器、系統保留與測試寄存器、通道控制寄存器及通道參數寄存器, 它們分別用于系統配置、系統保留與測試、通道切換控制及通道參數傳遞。當有外部事件發生時, 由輸入輸出通道向中斷寄存器發出請求信號, 中斷寄存器通知處理器并進行相應處理。定時器TCR1及TCR2的分頻系數確定TPU的時鐘頻率。對CP474來說, 分頻系數為8, 因而TPU的時鐘頻率為4MHz。基于PCC 的頻率相位測量就是直接利用可編程計算機控制器時間處理單元(TPU ) 在待測信號的周期內以頻率為4MHz 的計數, 從而測得電網頻率、機組頻率以及它們的相位差。
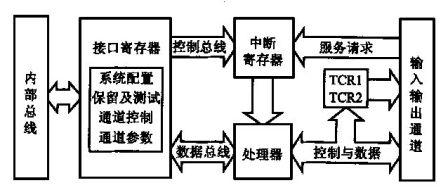
圖1 TPU 結構框圖
2 測頻測相原理及軟硬件設計
2. 1 測頻測相環節系統
PCC 測頻測相裝置系統結構如圖2所示。它由整形放大電路、數字量輸入模塊D I135及CPU 模塊CP474 3部分組成。整形放大電路將機組或電網頻率信號整形為同頻率的方波信號, 經D I135隔離并濾波后送入CP474的TPU 輸入通道。圖中機組頻率信號f j 整形放大后經D I135的I1和I2通道送入TPU 的CH0和CH1, 而電網頻率信號f w 整形放大后經D I135的I3和I4通道送入TPU的CH2 和CH3, 其中CH0和CH3分別用于測量機組頻率和電網頻率, 而CH2和CH4用于測量機組和電網頻率信號的相位差。

圖2 測頻測相硬件原理圖
2. 2 基于PCC 的頻率相位測量
2. 2. 1 功能模塊TPU
時間處理單元(TPU )功能模塊包含TPU 操作系統、TPU 配置、完成特定功能的TPU 程序模塊等, 應用程序通過它與TPU 通信傳遞參數和數據。
該功能模塊由B&R 公司專門研制的TPU 編碼連接器(TPU Code L inker) 產生, 并在CPU 熱啟動(warm start) 時將自己傳入TPU的RAM 中, 并從此接管TPU讓它完成用戶特定的功能。本裝置中頻率測量部分選用以內部時鐘為基準的門時間測量模塊TPXciX , 相位測量部分選用具有時間標志的數字量輸入模塊L TXditX, 將D I135 配置在CP474的插槽SLOT1 (這時D I135的I1~ I2對應于TPU的CH0~ CH3) , 機組頻率信號從D I135的通道I1與I2輸入, 電網頻率信號從D I135的通道I3與I2輸入, 其中通道I1與I3用于機組頻率與電網頻率測量, 通道I2與I4用于相位差測量。
2. 2. 2 頻率測量
頻率測量時, 為了避免輸入信號電壓幅值變化影響測頻精度, 采用測1個信號周期而不是半個信號周期, 因此設置L TXciX為循環測量連續2個上升沿之間的周期長度, 且每個信號周期均被測量。L TXciX在所測信號周期結束時, 輸出該周期內計數器的計數差值D ifCnt 及有效測量序號RdyCnt,RdyCnt 的值在每個有效測量后加1。設TPU 計數器的頻率為f c, 則所測頻率為
f = fc/DifCnt
在額定頻率50 Hz 附近且f c= 4MHz 時, 測頻分辨率為6. 25×10- 6Hz。雖然TPU 采用16位計數器, 但模塊TPXciX通過軟件方式將其擴充為32位, 當調用周期小于8. 2 m s 時, TPXciX模塊可保證正確的32位計數器輸出, 因此理論上計數器的計數范圍為0~ 4 294 967 295, 在時鐘頻率4MHz 時, 測頻下限小于0. 001 Hz。但由于電壓互感器及隔離變壓器等因素的限制, 并考慮到實際應用的需要, 取測頻下限為2 Hz, 且在2 Hz 以下時認為頻率為0。D I135的輸入響應為Ls 級, 其最大輸入頻率為100 kHz, 可見該測頻方式的上限可以很高, 考慮到發電機調速器的實際需要, 取其測頻上限為100 Hz。
2. 2. 3 相位測量
由于TPU 的所有模塊采用同一時間基準, 僅需將機組頻率信號和電網頻率信號分別送入TPU
的2個通道即可用模塊L TXditX對其相位進行測量。測量時, 以電網頻率信號為基準。當電網頻率信號的上升沿到達時, TPU 通道CH3向通道CH1送一連接信號, 并讀出計數值time0; 當機組頻率信號的上升沿到達時, TPU 直接讀出計數器計數值time2, 因此電網頻率f w 超前機組頻率f j 的時間
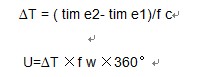
式中U為超前相位角, 其數值范圍為0~ 360°。在實際應用時, 當0< U< 180°時則表示電網頻率相位超前機組頻率相位; 當180°< U< 360°時則表示電網頻率相位滯后機組頻率; 當U= 180°時表示2個頻率信號反相。根據發電機調速器的實際需要, 相位差僅在機組頻率與電網頻率接近時測量, 當它們的頻率差較大時, 相位差測量程序關閉。有了機組頻率和電網頻率的相位差, 便可在機組空載跟蹤工況實現頻率與相位控制, 從而加快機組同期過程。
3 應用實例
采用這種測頻測相方式的PCC 調速器, 2000年4月安裝于陜西石泉鵝項頸發電廠3號機組上, 并對該調節系統進行了全面的試驗。試驗表明, 其性能指標滿足或優于國標GB?T 9652. 121997的要求。其中主要特性試驗結果如下:
(1) 開機并網時間為65 s。
(2) 甩25% 額定負荷時, 接力器不動時間為0. 18 s;
(3) 甩100% 額定負荷時, 轉速最大上升為額定轉速的132% , 調節時間為25 s。
試驗后調速器即投入運行, 同期并網速度快, 運行穩定, 且具有較高的可靠性, 獲得了用戶的好評。
4 結語
(1) 由整形電路和可編程計算機控制器(PCC)配以適當軟件實現了測頻測相功能, 并取代單片機測頻測相裝置, 使測頻電路大為簡化。
(2) 采用可編程計算機控制器(PCC) 作為測頻測相裝置的硬件, 其平均無故障率可達50×104 h,提高了系統的可靠性。
(3) 可編程計算機控制器內部計數器的計數脈沖頻率為4MHz (周期為0. 25×10- 3m s) , 用其直接測量頻率信號的當前周期, 在50 Hz 附近其測頻分辨率可達0. 000 625 Hz, 因而該測頻裝置具有較高的測頻精度及動態品質。
(4) 增加相位測量, 提高了機組并網速度。
參考文獻:
[ 1 ] 趙坤耀. 水輪機調速器發展綜述[J ]. 水力發電學報, 1996, (1) :78283.
[ 2 ] 劉國范, 等. 大型水輪機調速器測頻裝置的研究[J ]. 大電機技術, 1994, (2) : 59263.
[ 3 ] 陳啟卷, 等. 水輪機PLC 調速器數字測頻的研究[J ]. 大電機技術, 1994, (4) : 49252.
[ 4 ] 齊蓉. 新一代可編程計算機控制器技術[M ]. 西安: 西北工業大學出版社, 2000.
作者: 南海鵬(男, 副教授, 研究方向為水力機械及自動化) 姚李孝 王德意
(西安理工大學水電學院, 陜西省西安市710048)
(編輯 查仁柏)
