[摘 要] 采用可編程計算機控制器對鍋爐生產實現自動控制,介紹了控制系統的原理及軟件構成。
[關鍵詞] PCC 可編程計算機控制器 鍋爐 自動控制 軟件
1 概述
我廠鍋爐房有3 臺鍋爐,系統采用PCC - 2005 控制裝置,它既有邏輯控制、計時、計數、分支程序、子程序等順序控制功能,又有數據處理,模擬量調節,操作顯示,聯網通信等功能的控制系統。本課題嘗試把系統硬件高可靠性與軟件功能的完善性相結合,使系統長期可靠運行成為可能。
2 系統結構及功能
系統采用IBMPCPAT 工業控制機和PCC - 2005 模塊,整個系統由上位管理和下位控制機構成,系統構成如圖1 所示。
用于鍋爐本體數據采集及燃燒控制的PCC - 2005IPO 模塊有:
模擬量輸入模塊3AI755.6
模擬量輸出模塊3AO775.6
熱電阻輸入模塊3AT350
熱電偶輸入模塊3AT652.6
接口模塊3IF060.6
應用程序模塊3ME963.90 - 1
電源模塊3PS792.9
智能控制模塊4C2200.01 - 110
LCD 顯示模塊4D1164.00 - 090。
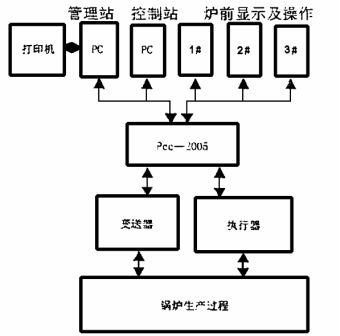
圖1 控制系統硬件結構圖
上位機主要完成過程的監控,通過3IF接口模塊與各個爐臺進行通信。
系統的功能:
(1) 鍋爐水位三沖量控制,高低水位報警,極限低水位. 高水位報警。
(2) 爐堂負壓自動調節。
(3) 燃燒自動調節,通過熱效率自動尋優實現最佳風煤比。
(4) 手動、自動無擾切換。
(5) 蒸汽壓力自動調節,超氣壓報警,并自動按順序壓火。
(6) CRT 畫面顯示。
a. 流程圖 顯示實時顯示開關量,模擬量,報警器狀態,根據狀態改變顏色及動態顯示;
b. 參數圖 按報表方式在CRT 上顯示設定值,過程值,累計值熱效率等技術參數;
c. 棒狀圖 根據過程參量在CRT上顯示,同時顯示過程量值;
d. 設定圖 按回路的棒狀圖在CRT上顯示回路設定值、過程值、輸出值。在此狀態下可對回路參數進行設定;
e. 定時或隨機打印報表;
f . 完善的系統自診斷功能,可診斷浮球水位計、水位變送器、溫度變送器、壓力變送器的錯誤,并根據結果改變控制方式及報警。
3 控制原理
3. 1 鍋爐汽包水位自動控制
給水調節系統的任務是與鍋爐蒸發量相平衡,并維持汽包水位在工藝規定的范圍,給水系統采用三沖量自動調節。水位控制流程如圖2 所示。
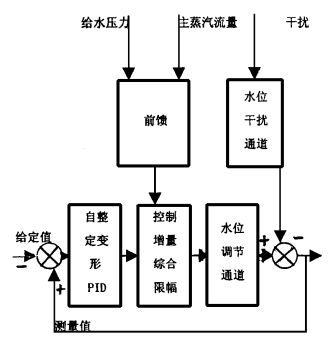
圖2 鍋爐水位控制流程圖
沖量控制的主反饋信號為水位差壓變送器的輸出,輔助反饋信號為蒸汽流量,給水流量。水位調節采用自整定變型PID 控制算法,在大偏差時自動分離積分作用。并在水位越限前施行安全限控制。三沖量控制特點是:控制閥門閥位維持水位的恒定,水位平穩克服虛假水位的影響。
3. 2 燃燒控制系統
鍋爐燃燒系統控制關鍵是風P煤配比的控制,系統自動修正風P煤比,使風煤配比始終是最佳的,也就保證了鍋爐始終在最高的熱效率下工作。
本系統中采用了自尋優技術,使得當環境工況條件發生變化時,系統自動修正風P煤
配比,使風煤配比始終是最佳的,也就保證了鍋爐始終在最高的熱效率下工作。
4 控制軟件結構
4. 1 控制軟件
控制軟件采用模塊化程序結構,整個程序主要分為5 個部分(見圖3) 。
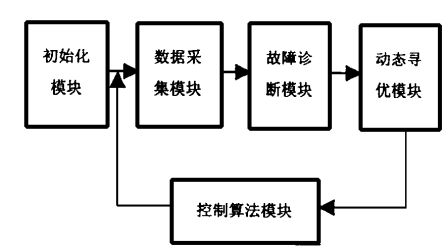
圖3 控制軟件流程圖
4.1.1 初始化模塊 主要完成APD ,DPA 模塊,各數據區的初始化工作。
4.1.2 數據采集模塊 主要完成模擬量采集、濾波及累積計算。
4.1.3 故障診斷模塊 主要完成鍋爐系統及變送器、執行器的故障診斷功能。
4.1.4 動態尋優模塊 主要完成風煤比的動態尋優及存儲數據的積累。
4.1.5 控制算法模塊 主要完成水位控制、燃燒控制、負壓控制,能根據系統診斷結果及尋優狀態進行不同控制方式的切換。
4. 2 系統的監測軟件
包括各種畫面的顯示、報表的打印、參數的設定等。程序結構如圖4 所示。
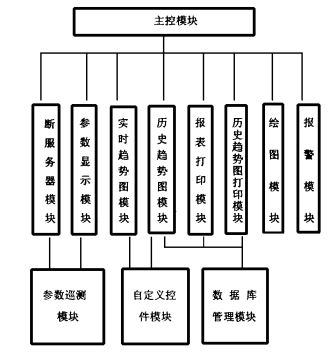
圖4 程序結構框圖
軟件系統分為主程序和中斷服務程序,主程序完成系統的初始化和人機界面的管理。包括顯示器管理,鍵盤管理,命令處理模塊,時鐘管理,改字處理模塊等。中斷服務程序完成與下位機的通信,工程量變換,自動報警處理,歷史數據存儲。
5 結論
由于采用了可編程控制器,因而實現了鍋爐在多種工況下的全程控制。系統配置合理,性能可靠,操作方便,人機界面友好,顯示、制表和繪圖功能齊全,實用性強。該系統的投入使用,對提高工廠企業的產品質量和管理水平起到了促進作用。
作 者 簡 介
張大海:哈爾濱電機有限責任公司,工程師。郵編:150040
馬冬穎:哈爾濱硅酸鹽廠,工程師。郵編:150046
周 乾:中國電子進出口黑龍江公司。郵編:150001
