Real-Motion® 駕駛模擬器保證了真實(shí)的賽車感覺。 不僅因?yàn)轳{駛者坐在令人興奮的汽車之中,而且還因?yàn)轳{駛感非常寫實(shí),讓駕駛者感覺自己的確身在真實(shí)的賽道之中。Real-Motion® 的開發(fā)商和制造商是 Steel Construction andRobotic Machinery(S.Co.R.E)。總部位于黎巴嫩阿姆希特的該公司專門經(jīng)營應(yīng)用于各種領(lǐng)域的動(dòng)態(tài)運(yùn)動(dòng)模擬器。他們的賽車模擬器由 Beckhoff 基于 PC 和 EtherCAT 的控制平臺(tái)控制。 該項(xiàng)目的實(shí)施由 Beckhoff 位于黎巴嫩的獨(dú)家合作伙伴,Industrial Technologies S.A.L.(ITEC)提供支持。
Real-Motion® 的賽車模擬器保證了振奮和樂趣: 它完美地模擬了真實(shí)賽車的操控。
“2010 年之前,S.Co.R.E 的所有駕駛模擬器都裝配的是傳統(tǒng) PLC 系統(tǒng)。但是,我們開發(fā) Real-Motion. 時(shí)遇到了技術(shù)水平的限制”,Gaby Mike,Real-Motion 的總裁解釋道。本項(xiàng)目最大的挑戰(zhàn)便是需要?jiǎng)?chuàng)造能夠?qū)ν獠抠愜嚢l(fā)動(dòng)機(jī)數(shù)據(jù)做出實(shí)時(shí)反應(yīng)的精確同步運(yùn)動(dòng)控制平臺(tái)。其它的要求還包括客戶特定運(yùn)動(dòng)曲線的數(shù)學(xué)計(jì)算以及模擬器運(yùn)行時(shí)改變目標(biāo)點(diǎn)的可能性。
更高的以太網(wǎng)數(shù)據(jù)傳輸能力
“選擇 Beckhoff 的決定性標(biāo)準(zhǔn)是其基于 PC 的控制平臺(tái)的開放性以及高數(shù)據(jù)傳輸能力,”Industrial Technologies 的總裁 Jad Wehbe 說道。“在這里用作為控制器的 Beckhoff C6915 控制柜工業(yè) PC 具有集成式的雙以太網(wǎng)適配器。服務(wù)器上多個(gè)模擬器的同步通過以太網(wǎng)進(jìn)行。只有通過高速以太網(wǎng),我們才能實(shí)每秒高達(dá) 200 數(shù)據(jù)包的數(shù)據(jù)傳輸量,”Gaby Mike補(bǔ)充道。由于使用了以太網(wǎng)和 UDP 數(shù)據(jù)包,我們便可以使用更長的數(shù)據(jù)線和無限量的網(wǎng)絡(luò)節(jié)點(diǎn)。
賽車模擬器的運(yùn)動(dòng)基于獨(dú)立軸間的插補(bǔ)。因此,它們同步時(shí)的每次延時(shí)都會(huì)導(dǎo)致各方向上不需要的移動(dòng)。Beckhoff 的實(shí)時(shí)以太網(wǎng)總線系統(tǒng),EtherCAT,以及其分布式時(shí)鐘功能為各種驅(qū)動(dòng)器的精確同步創(chuàng)造了條件。
調(diào)整伺服電動(dòng)機(jī)使其適應(yīng)客戶特定的移動(dòng)曲線
考慮到操作者的動(dòng)作,車輛模擬器中的移動(dòng)目標(biāo)點(diǎn)必須由伺服電機(jī)快速驅(qū)動(dòng)。作為 NC PTP 數(shù)據(jù)包組件的外部設(shè)定點(diǎn)生成器已擴(kuò)展了 TwinCATNC PTP 自動(dòng)化軟件中的傳統(tǒng)設(shè)定點(diǎn)生成器。在結(jié)構(gòu)化文本的幫助下,用于外部設(shè)定點(diǎn)生成的計(jì)算被編程到標(biāo)準(zhǔn) PLC 中。 因此,客戶特定移動(dòng)的復(fù)雜計(jì)算(優(yōu)化 7 段法)與 NC PTP 標(biāo)準(zhǔn)算法的結(jié)合就非常的簡單。這樣就可以很容易地解決目標(biāo)點(diǎn)的動(dòng)態(tài)變化。由于基于 PC 的平臺(tái)具有高性能,新設(shè)置點(diǎn)數(shù)值的復(fù)雜數(shù)學(xué)算法就能夠得以實(shí)時(shí)計(jì)算。
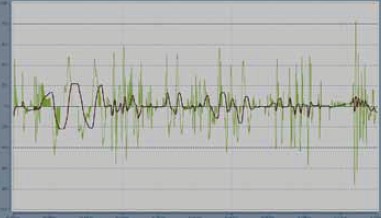
黑線:要求的目標(biāo)點(diǎn),綠線:速度曲線,紅線:實(shí)際位置
TwinSAFE 改進(jìn)了安全性功能安全性是運(yùn)動(dòng)模擬器很重要的一個(gè)方面。考慮到急沖和減速限制,如果按下緊急按鈕,模擬器就必須立即停止。“由于有了 TwinSAFE 模塊 EL6900和 EL1940,我們便能夠保證急停按鈕的故障安全功能”,Real-Motion 的總裁說道。
