1 前言
所有卷繞機都存在一個共同現象,即卷繞物在收卷過程中卷筒越卷越大,卷筒直徑也隨之增大,由線速度和轉速的關系(線速度L=轉速n*∏*D)可知如轉速n不變,隨著直徑D的增大,線速度L不斷加快,因此會造成卷繞物拉斷等不愿見到的結果,為滿足設備控制工藝要求,達到恒線速度控制目的,我們引入變頻器控制來實現。那么,通過變頻器如何來實現呢?常見的控制原理是通過放置編碼器實時檢測線速度信號,當卷筒直徑增大導致線速度隨之增大,旋轉編碼器檢測輸出給變頻器的脈沖增多,通過與設定脈沖數比較,控制變頻器輸出頻率降低,從而降低電機轉速,達到恒線速度控制的目的。
本文以臺達VE系列變頻器為例,來介紹通過變頻器,是如何實現恒線速度功能的。
2 VE系列變頻器實現恒線速度功能原理
臺達VE系列變頻器內含恒線速度功能的典型應用模塊,使用時,大家只需要調用此模塊,按照模塊框圖設定好對應的參數即可。圖1為典型應用的系統硬件框圖。
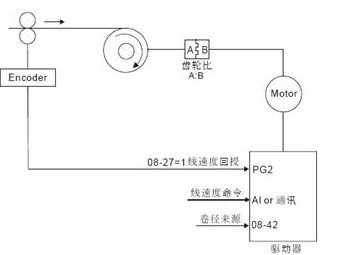
圖1 典型應用的系統硬件框圖
從框圖上我們可以看到,VE系列變頻器所支持的恒線速度功能,是通過編碼器來檢測材料上的實時線速度,從而實現線速度死循環,滿足線速度恒定的要求。線速度的目標值,一般是通過電位器或者通訊的方式,在變頻器上設定。以上方法是最常使用的方法,也是最基本的方法。
與其他品牌變頻器不同之處在于,臺達VE系列變頻器的恒線速度模式,在常用方法的基礎上,引入了材料卷徑的因素,通過優良的算法,實時計算材料卷徑,使在運行過程中變頻器能夠更加清楚運行狀態,調節更容易穩定,參數設定也更加容易。
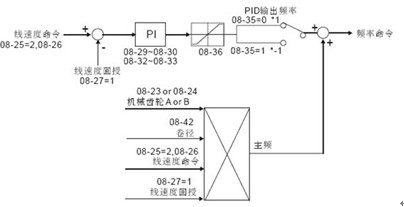
圖2 系統框圖
對應系統框圖,我們來看看參數的設定步驟。
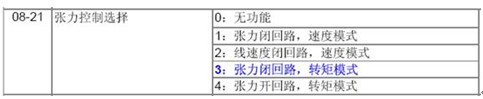
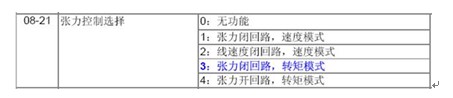
步驟一:調用恒線速度的模塊,將參數08-21設定為2。
步驟二:設定線速度命令來源08-25和08-26。

設定線速度回授來源08-27和08-37。
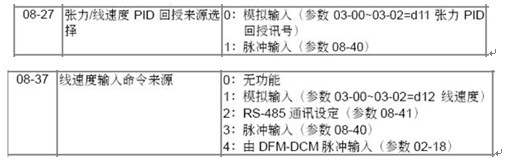
在恒線速度模式下,目前08-27和08-37只支持脈沖輸入,即08-27=1,08-37=3。
由于需要將編碼器信號轉化為線速度信號,所以我們還需要設定08-40。

設定最高線速度08-38和最低線速度08-39。

步驟三:設定機械相關參數。
機械齒輪比08-23和08-24

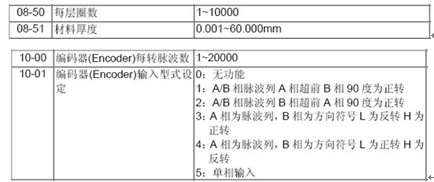
卷徑的情況,如最大卷徑08-43,最小卷徑08-44以及當前卷徑08-54

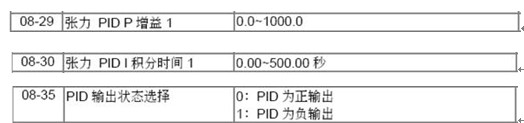
步驟四:設定PID的相關參數
通過以上設定,我們就完成了對恒線速度功能參數的設定。
在某些場合,可能無法安裝材料實際線速度的檢測機構,或者說由于打滑等原因,容易出現飛車等危險的情況。為了滿足這種情況,我們也可以采用開環的方式,即沒有實時的線速度回饋信號,來完成恒線速度的工作模式。由于臺達VE系列變頻器內建有卷徑計算功能模塊,在實際運行過程中,當實際卷徑發生變化時,我們只要能夠準確判斷出現有卷徑,就可以調整輸出頻率,從而達到線速度恒定的目的,這樣我們就可以通過開環的方式來實現恒線速度的運行。
目前VE內建的卷徑計算功能模塊如下:
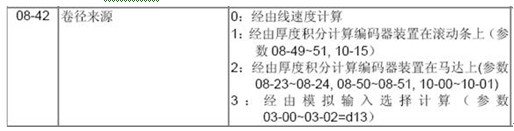
我們能夠采用的是第一、第二、第三種模式。第二種模式,我們只需要采用一個帶編碼器的電機即可實現,安裝簡單方便;第一種模式,我們就需要在收卷輥上安裝一個接近開關,主要作用是計算收卷輥旋轉了多少圈;第三種模式,就需要借助專門的檢測裝置了,價格相對較高。這里需要特別提出的是:使用第一/第二種方式來計算卷徑,有一定的局限性,即需要設定材料厚度,材料厚度不均勻的話,做出來的效果就不會太好;而且對于線材來說,除非每排排列的很整齊,否則也不太適合使用。此種模式比較適合用于材料厚度均勻的片材。
為了達到這種工作模式,我們需要借助于張力死循環速度模式。下面我們來看看是如何實現的。
張力死循環速度模式的典型應用系統框圖如圖3。

圖3 張力死循環速度模式系統框圖
與我們提到的開環恒線速度相比,以上部分多了PID的部分,所以我們只需要將PID的功能關閉即可。下面我們來看看參數的設定步驟。
步驟一:調用恒線速度的模塊,將參數08-21設定為1。
步驟二:設定線速度命令來源08-37。

一般來說,使用模擬量的場合較多,即選項1。
設定最高線速度08-38和最低線速度08-39

步驟三:設定機械相關參數。
機械齒輪比08-23和08-24。

卷徑的情況,如最大卷徑08-43,最小卷徑08-44以及當前卷徑08-54。

對于卷徑計算,我們介紹一下剛才提到的三種方法需要設定的參數。
當08-42=1時,我們需要08-49,08-50,08-51;

當08-42=2時,我們需要08-50,08-51,10-00,10-01;
當08-42=3時,我們只需要將對應的仿真量端子功能定義為13即可。
步驟四:設定PID的相關參數。

由于此模式沒有線速度的回饋,所以關閉PID功能即可,也就是將08-29=0,08-30=0。
3 結束語
以上談到的兩種模式經過分切機的測試,完全能夠達到恒線速度的要求:使用第一種恒線速度模式,隨著實際卷徑的變化,線速度能夠保持與設定值一致,且基本無誤差;使用第二種方式(開環恒線速度模式),實際線速度與設定值的誤差量也很小。客戶對第一種方式表示非常滿意,在要求不高的場合,對第二種方式也可以接受。
作者簡介:
王浩,男,1978年出生,畢業于武漢科技大學自動化專業,目前任職于中達電通變頻器產品開發處,負責臺達變頻器新產品的測試、推廣和培訓工作,經驗豐富,知識全面。
