多年以來,對機械手進行動力學建模是學術圈當中的一個已知方法。它通常被用作機器人和工程實驗室的一個工具,用于研發仿真機器人與高級控制算法、運動模擬以及其他學術追求。動力學建模涉及數學公式的開發,用于描述機器人的動態特性,比如慣性、質量、重心以及無法方便加以測量的其他特性。雖然頻繁地被用于理論研究,但是,使用動力學建模方法來改善機器人控制一直以來被工業機器人開發者和制造商所忽視。
Servotronix首先對動力學建模的潛力進行了考慮,以便解決一家高速Delta機器人制造商所經歷的性能問題。該種機器人被應用于半導體行業。
使用機器人的太陽能晶元處理應用,要求高加速性能和極高的精確性。但由于其固有的脆性結構,因而Delta機械手非常容易斷裂。此外,它還對昂貴的生產負載與生產材料構成撞擊和損壞的威脅。

Delta機器人對自身和負載都會構成損傷風險
在某些系統當中,機械手的增量運動是以通過球形接頭連接到移動平臺和臂連桿的機械平行四邊形為基礎的。如果超出了某些位置或角度,那么導致機械手解體所需的力將會大幅降低,如果發生碰撞或強力推拉,機械手可能會非常容易發生解體。讓這種情形進一步復雜化的是,這些斷裂點通常位于伸出位置,這些位置具有撞擊到某些障礙物的極大風險。如果在機械手分解之后,其所造成的撞擊后果仍然未被發現,那將可能會造成進一步的損害。
為了克服這些缺點,對Delta機械手更好地加以控制,Servotronix的工程師采用了動力學模型并對其進行了強化,而動力學模型的源頭正是來自學術研究。
由此所產生的模型,或者描述Delta機械手的算法集,還僅僅是故事的一半。
這是因為模型具有通用性。但由于機器人具有不同的尺寸和質量,因此實際參數值將會有所不同。雖然機器人的運動學原理都是相同的,但是各機器人的物理特性是不同的。即使是在某個已經制造的機器人系列當中,每種機器人的物理特性也可能會略有不同,并將會對性能產生不同影響。
一旦已經對機器人系統進行建模,就需要獲取動力學參數的準確數值。Servotronix通過開發額外算法來實現這一點,以便自動確定運動學和動力學參數。
雖然有些參數,比如機器人臂連桿的幾何尺寸,可以方便地加以測量并應用到公式當中,但其他參數值,比如每個連桿的重心,是通過自動識別程序來加以確定的。
在識別過程中,機器人將會隨機移動,動力學參數的數值是通過Servotronix的識別算法來加以確定。內部和外部要素都被納入到計算當中,比如形狀、材料、電纜以及摩擦等。
由于模型控制Delta機器人的成功實施,Servotronix進一步針對其他類型的機器人開發了動力學模型,比如SCARA機器人,4軸橫臂機器人,以及5軸伽利略球形機器人。本公司認識到,可以通過動力學建模來滿足對于機器人更高輸出、更快速度以及更低成本的日益增長的需求。

對一個5軸伽利略球形機器人建立動力學模型
通過使用動力學模型,Servotronix客戶的機器人已經實現了更快的穩定時間和更好的運動軌跡控制。該種方法還有一個附帶的好處,那就是可以通過機械參數,特別是摩擦常數隨時間的變化,來檢測系統的磨損情況。
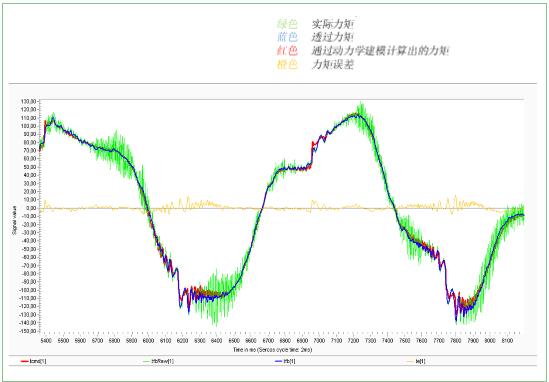
正如力矩誤差所顯示的那樣,計算出來的力矩值幾乎準確預測了透過力矩值
如今,基于模型的控制已經是Servotronix softMC多軸控制器的一個內置功能。其有效性將通過一條實時運動總線系統最終得以實現。EtherCAT可以讓Servotronix softMC多軸控制器每毫秒更新驅動數值,在每次采樣過程中,softMC都會向驅動器發送,并從驅動器接收命令以及反饋的力矩值,以及標準的位置和速度值。softMC通常與Servotronix CDHD伺服驅動器匹配使用。可以對softMC進行設置,以便將接收到的力矩當作一個附加值,作為自行計算力矩值的一個補充。

采用了模型控制以及實時EtherCAT運動總線的Servotronix softMC 3 和 softMC 7(由左至右)多軸運動控制器
模型控制的直接好處就是,正如Delta機器人案例所展示的那樣,可以檢測和避免碰撞,從而使負載、工作區以及操作員獲得更好的保護。此外,它還可以消除對于力傳感器的需求,從而可以簡化系統設計,降低成本。
這種控制方法最顯著的好處,就是更強的機器人行為能力和驅動性能。由于到達某個位置所需要的力矩能夠以更高的精度加以計算和控制,從而可以使機器人的運動路徑獲得高度優化。所需要的電流也更加平穩,因為電流數據可以通過計算得出,而非簡單地通過反饋回路加以獲取,從而提供了更好的速度控制,減少了機械手發生抖動或驟然運動的可能。
通過對機器人在運動過程中所需的力矩和力進行評估,并防止出現過度力矩,可以方便安全地增加機器人的速度,同時縮短振蕩和穩定時間。最終結果就是,基于模型的控制可以讓系統運動得更加快速和準確,實現更高的處理能力。
