摘要:
“產(chǎn)學(xué)結(jié)合,學(xué)以致用“是貝加萊學(xué)界聯(lián)盟競(jìng)賽的主旨,競(jìng)賽每?jī)赡昱e辦一屆,面向高等教育的自動(dòng)化、機(jī)電相關(guān)專業(yè),由2-3名學(xué)生與一名指導(dǎo)老師構(gòu)成一個(gè)戰(zhàn)隊(duì),經(jīng)過預(yù)賽與決賽兩個(gè)階段,最終由學(xué)界聯(lián)盟中的大學(xué)教授、貝加萊自動(dòng)化學(xué)院共同構(gòu)成評(píng)委,對(duì)進(jìn)入決賽的小組進(jìn)行答辯,并評(píng)出特等獎(jiǎng)、一等獎(jiǎng)、二等獎(jiǎng)若干名。
“產(chǎn)學(xué)結(jié)合,學(xué)以致用“是貝加萊學(xué)界聯(lián)盟競(jìng)賽的主旨,競(jìng)賽每?jī)赡昱e辦一屆,面向高等教育的自動(dòng)化、機(jī)電相關(guān)專業(yè),由2-3名學(xué)生與一名指導(dǎo)老師構(gòu)成一個(gè)戰(zhàn)隊(duì),經(jīng)過預(yù)賽與決賽兩個(gè)階段,最終由學(xué)界聯(lián)盟中的大學(xué)教授、貝加萊自動(dòng)化學(xué)院共同構(gòu)成評(píng)委,對(duì)進(jìn)入決賽的小組進(jìn)行答辯,并評(píng)出特等獎(jiǎng)、一等獎(jiǎng)、二等獎(jiǎng)若干名。
1、選題:現(xiàn)實(shí)的應(yīng)用場(chǎng)景
1.1現(xiàn)實(shí)的應(yīng)用
岸橋,布局于港口,用于對(duì)集裝箱船進(jìn)行吊裝業(yè)務(wù),大型集裝箱船可容納達(dá)到18000甚至更高的裝載能力,并且,港口較大的風(fēng)也會(huì)給吊裝造成困難,擺動(dòng)不僅僅來(lái)自整個(gè)過程的鐘擺效應(yīng),還來(lái)自風(fēng)對(duì)集裝箱本身的干擾。

岸橋
自動(dòng)軌道吊是用于從港口到堆場(chǎng)短距離的吊裝,或者堆場(chǎng)到運(yùn)輸車輛上的吊裝,這些也是要速度比較快的。

自動(dòng)軌道吊
在大型的鋼鐵企業(yè),軋鋼成卷后的吊裝或者卷裝用于開卷之前的吊裝,均需要大型龍門吊來(lái)進(jìn)行搬運(yùn),而且往往量比較大,頻繁的工作,若吊裝速度較低,會(huì)給整個(gè)生產(chǎn)帶來(lái)生產(chǎn)物流瓶頸。

龍門橋吊
因此,在現(xiàn)實(shí)應(yīng)用中,防搖擺的控制是一個(gè)普遍存在的問題,很多仍然停留在機(jī)械方式,另外,也有部分采用機(jī)電一體化的,但往往成本較高,或者性能不佳,因此,需要進(jìn)行優(yōu)化改善,開發(fā)“防搖“系統(tǒng)降低吊裝過程中的擺動(dòng),可以大幅提升港口吞吐能力,產(chǎn)生較大的時(shí)間資金效益。
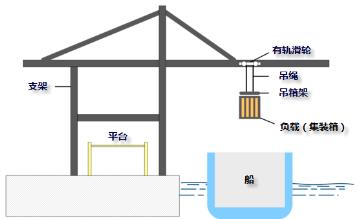
岸橋集裝箱吊裝示意圖
開發(fā)防搖系統(tǒng)正是基于這一應(yīng)用背景而設(shè)計(jì),因此,具有極大的現(xiàn)實(shí)意義,并且其對(duì)于算法設(shè)計(jì)有較高的要求,最為適合大學(xué)自動(dòng)控制專業(yè)學(xué)生的能力提升,因此,作為比賽題目。
2、競(jìng)賽硬件模型
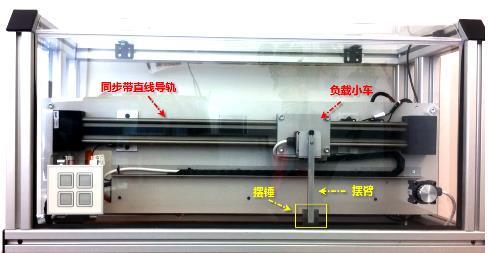
貝加萊為本次競(jìng)賽專門研發(fā)了一套防搖系統(tǒng)裝置,將整個(gè)碼頭裝卸裝置加以抽象提煉,并盡可能的做到真實(shí)還原。該裝置體積小,設(shè)計(jì)精巧,十分適合學(xué)校師生在實(shí)驗(yàn)室做研究開發(fā)。
圖
系統(tǒng)描述:防搖系統(tǒng)模型裝置部分由同步帶直線導(dǎo)軌、負(fù)載小車和擺錘組成。其中同步帶直線導(dǎo)軌由伺服電機(jī)驅(qū)動(dòng),使得固定在其滑臺(tái)上的負(fù)載小車能夠進(jìn)行水平移動(dòng);負(fù)載小車連接擺臂及擺錘,其中擺臂為材質(zhì)較輕的鋁合金制成,其長(zhǎng)度不會(huì)改變;擺錘為較重的鋼制成,使用螺絲與擺臂連接固定。在負(fù)載小車上安裝有編碼器并與擺臂連接,擺臂能以編碼器軸為旋轉(zhuǎn)軸線,在與編碼器軸正交的平面上繞該軸做圓周運(yùn)動(dòng)。編碼器可以準(zhǔn)確測(cè)量擺臂的擺動(dòng)角度。
3、初賽
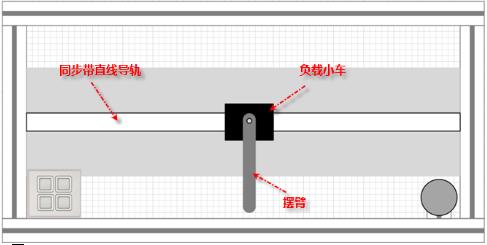
為了方便賽題的描述,整套防搖系統(tǒng)裝置可以抽象為下圖所示的模型:
初賽將是使用數(shù)學(xué)模型和Automation Studio的仿真功能來(lái)完成,并不使用真實(shí)的硬件系統(tǒng)。
3.1.初賽題目
3.1.1控制要求
將擺臂拉至水平(即與豎直方向成90°夾角),放開擺臂,使其自由擺動(dòng),當(dāng)擺角小于某個(gè)角度時(shí),開啟控制器,通過控制負(fù)載小車在導(dǎo)軌上左右移動(dòng),使得擺臂盡快穩(wěn)定下來(lái)
3.1.2初賽提交成果
初賽結(jié)束前,需要提交初賽階段的設(shè)計(jì)成果。順利通過初賽選拔的隊(duì)伍可以進(jìn)入決賽。
提交的設(shè)計(jì)成果包含以下內(nèi)容:
● 系統(tǒng)模型的建立。
● 賽題的分析、計(jì)劃、過程和結(jié)果。控制算法的分析說(shuō)明,包括選擇該算法的原因、該算法如何實(shí)現(xiàn)等等。
● 程序源代碼,要有詳細(xì)的注釋說(shuō)明。
● 選出一位隊(duì)長(zhǎng),說(shuō)明隊(duì)伍組建情況和隊(duì)員分工等等。
● 其他需要說(shuō)明備注的問題。
該成果的提交形式可不僅限于傳統(tǒng)的論文的形式,歡迎使用其他更豐富的表達(dá)形式
3.1.3初賽評(píng)分規(guī)則
根據(jù)每隊(duì)提交的初賽階段的設(shè)計(jì)成果,我公司設(shè)計(jì)了一套打分準(zhǔn)則,每隊(duì)的最終得分主要由各自的完成情況和各項(xiàng)性能指標(biāo)共同決定。
3.1.3.1完成情況得分
首先,介紹一下完成情況的評(píng)分規(guī)則,初賽題目只有一道題,相對(duì)簡(jiǎn)單,主要根據(jù)完成指定動(dòng)作的情況每隊(duì)得到相應(yīng)的分?jǐn)?shù),具體見下表:

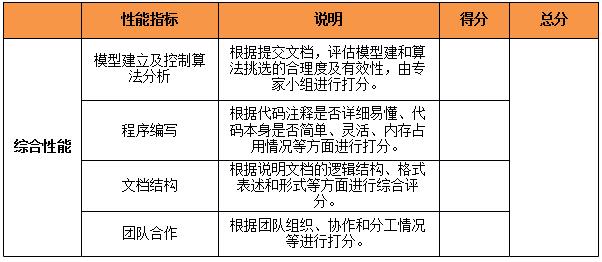
3.1.3.2各項(xiàng)性能指標(biāo)評(píng)分
其次,介紹一下性能指標(biāo)的評(píng)分規(guī)則,根據(jù)大家提交的文檔說(shuō)明,我們給出了5項(xiàng)性能指標(biāo)。分別是:方案設(shè)計(jì)、程序編寫、報(bào)告邏輯結(jié)構(gòu)、團(tuán)隊(duì)合作。各項(xiàng)性能指標(biāo)具體內(nèi)容說(shuō)明見下表:
4、決賽題目
4.1決賽題目
4.1.1決賽題目(1)
控制要求:負(fù)載初始速度為0,控制負(fù)載從起點(diǎn)運(yùn)動(dòng)到終點(diǎn),通過添加控制器,使擺臂在整個(gè)
動(dòng)過程中盡量穩(wěn)定不搖晃。運(yùn)動(dòng)速度分為高速和低速兩種情況。
4.1.2決賽題目(2)
控制要求:負(fù)載初始速度為0,同樣是讓被控對(duì)象-箱子從起點(diǎn)運(yùn)動(dòng)到終點(diǎn),在整個(gè)運(yùn)動(dòng)過程中,隨機(jī)選擇定點(diǎn)使得負(fù)載突然停下,停止的整個(gè)過程也要保持?jǐn)[臂不搖晃
4.1.3決賽題目(3)
控制要求:負(fù)載初始速度不為0,控制負(fù)載從起點(diǎn)運(yùn)動(dòng)到終點(diǎn),通過添加控制器,使擺臂在整個(gè)運(yùn)動(dòng)過程中盡量穩(wěn)定不搖晃。
4.1.4附加題
根據(jù)各參賽組初賽及決賽題(1)、(2)、(3)的完成情況,將會(huì)酌情加設(shè)附加題。
4.2決賽提交成果與評(píng)分規(guī)則
提交成果和評(píng)分準(zhǔn)則會(huì)在后續(xù)公布,敬請(qǐng)留意
5、設(shè)計(jì)要求
5.1軟件要求
參賽組需要利用我們提供的仿真模型和硬件和Automation Studio軟件平臺(tái)共同實(shí)現(xiàn)整個(gè)控制系統(tǒng)。要掌握AS軟件的基本使用,包括基礎(chǔ)PLC控制、軟件編程和基礎(chǔ)運(yùn)動(dòng)控制(這方面我們會(huì)提供培訓(xùn))。對(duì)AS熟練的參賽組也可以制作系統(tǒng)的控制畫面,我們也會(huì)酌情加分。
5.2初賽要求
參賽小組需要在初賽完成時(shí)提交完成情況報(bào)告,包括賽題的分析、系統(tǒng)建模和算法使用分析等,并打包你們的整個(gè)程序供我們測(cè)試。我們會(huì)根據(jù)所有組的完成情況進(jìn)行初步篩選,通過篩選的隊(duì)伍可以進(jìn)入決賽。詳細(xì)情況可以參照評(píng)分標(biāo)準(zhǔn)文檔。
5.3決賽要求
參賽小組需要在決賽完成時(shí)提交完成情況報(bào)告,包括競(jìng)賽的分析、計(jì)劃、過程和結(jié)果文檔、算法使用分析等等,并打包你們的程序源代碼等供我們測(cè)試,我們將根據(jù)大家的完成情況酌情加設(shè)附加題。詳細(xì)情況可以參照評(píng)分標(biāo)準(zhǔn)文檔。在決賽的評(píng)分日當(dāng)天參賽者需要進(jìn)行演示及對(duì)整個(gè)決賽過程進(jìn)行演講總結(jié)。
6、報(bào)名
各高校全日制本科生、研究生均可報(bào)名參加。以小組形式參賽。每組參賽者不超過3人,輔導(dǎo)老師不超過2人
7、競(jìng)賽時(shí)間安排
7.1.組織報(bào)名
時(shí)間:截止至2016年4月30日
報(bào)名方式:填寫附件報(bào)名表并發(fā)送至support.cn@br-automation.com
7.2.發(fā)放軟硬件資料
時(shí)間:2016年4月15日起
內(nèi)容:比賽說(shuō)明書,必要的軟件,軟件使用說(shuō)明,模型和例子程序等,初賽評(píng)分準(zhǔn)則等。
7.3.初賽培訓(xùn)安排
時(shí)間:2016年4月15日至5月30日
培訓(xùn)方式:發(fā)布資料的自學(xué)習(xí)、在線培訓(xùn)和在線F&Q。
培訓(xùn)內(nèi)容:針對(duì)初賽題目,分析如何使用相關(guān)軟件,如何運(yùn)行例子程序等。
7.4.初賽結(jié)果提交
時(shí)間:2016年7月1日之前
提交內(nèi)容:Automation Studio項(xiàng)目文件,競(jìng)賽描述文檔及其他資料等
7.5初賽結(jié)果發(fā)布
時(shí)間:2016年7月30日前
評(píng)分準(zhǔn)則: 根據(jù)《2014年度貝加萊學(xué)界聯(lián)盟大賽初賽評(píng)分說(shuō)明》標(biāo)準(zhǔn)評(píng)分
7.6決賽培訓(xùn)
時(shí)間:2016年7月- 9月
舉辦方式:文檔自學(xué)習(xí)、在線培訓(xùn)和集中培訓(xùn)(上海)
培訓(xùn)內(nèi)容:硬件安裝調(diào)試等,文檔介紹
7.7決賽提交、現(xiàn)場(chǎng)審核、頒布名次
時(shí)間:10月24-28日
比賽方式:現(xiàn)場(chǎng)成績(jī)演示、PPT演講答辯,具體參考《2016年度貝加萊學(xué)界聯(lián)盟大賽決賽評(píng)分說(shuō)明》
決賽活動(dòng)和時(shí)間安排:待定
8、獎(jiǎng)項(xiàng)設(shè)置
本競(jìng)賽設(shè)立特等獎(jiǎng)一名,獎(jiǎng)勵(lì)為獲獎(jiǎng)學(xué)生和指導(dǎo)教師前往貝加萊工業(yè)自動(dòng)化奧地利總部游學(xué)一周。一等獎(jiǎng)兩名;二等獎(jiǎng)四名;三等獎(jiǎng)六名及優(yōu)勝獎(jiǎng)若干。除特等獎(jiǎng)之外其余獎(jiǎng)項(xiàng)的獎(jiǎng)勵(lì)待定.
9、競(jìng)賽組委會(huì)聯(lián)系方式
貝加萊工業(yè)自動(dòng)化(中國(guó))有限公司
上海市田林路487號(hào)21號(hào)樓
郵政編碼 200233
聯(lián)系電話 021-54644800 學(xué)界聯(lián)盟支持
聯(lián)系郵件 support.cn@br-automation.com