【摘要】主要針對(duì)鍋爐控制系統(tǒng)的特點(diǎn)、控制策略的特點(diǎn)及使用方法、PID控制回路的整定和無(wú)擾動(dòng)切換等方面介紹了力控控制策略在控制系統(tǒng)中的應(yīng)用。
【關(guān)鍵字】控制策略 實(shí)時(shí)數(shù)據(jù)庫(kù) 算法塊 PID 參數(shù)整定
一、前言
眾所周知,工業(yè)過(guò)程控制系統(tǒng)的安全性、穩(wěn)定性、準(zhǔn)確性和經(jīng)濟(jì)性是企業(yè)考慮的重中之重,是衡量系統(tǒng)是否可行的重要指標(biāo)。隨著工業(yè)自動(dòng)化整體技術(shù)水平的提高,方案的選擇范圍增多,但據(jù)不同的要求和不同的側(cè)重點(diǎn),最優(yōu)方案始終是我們的首選。其中以三維力控自動(dòng)化監(jiān)控組態(tài)軟件為上位機(jī)的控制系統(tǒng)中,在保證系統(tǒng)的安全性、準(zhǔn)確性和穩(wěn)定性的同時(shí),也保證了項(xiàng)目投資成本的最小化。
二、系統(tǒng)特點(diǎn)
在鍋爐控制系統(tǒng)中,鍋爐汽包水位的控制、過(guò)熱蒸汽的溫度控制、燃料量流量的控制和送風(fēng)流量的控制是控制重點(diǎn),下面就汽包水位控制過(guò)程進(jìn)行分析,明確控制對(duì)象、操作量和被調(diào)量等參數(shù),用類似方法可分析其它的控制過(guò)程。
鍋爐汽包水位控制:汽包水位調(diào)節(jié)系統(tǒng)的主要任務(wù)是使給水量與鍋爐蒸發(fā)量保持平衡,并維持汽包水位在工藝規(guī)定的范圍內(nèi)。由此分析出鍋爐的受控變量為汽包水位,操縱變量是給水流量。汽包水位是鍋爐運(yùn)行的主要指標(biāo),水位過(guò)高或過(guò)低都會(huì)帶來(lái)比較嚴(yán)重的后果。所以通常采用三沖量控制方案,即分別對(duì)給水流量、蒸汽流量和水位進(jìn)行控制,控制系統(tǒng)結(jié)構(gòu)如圖一示:
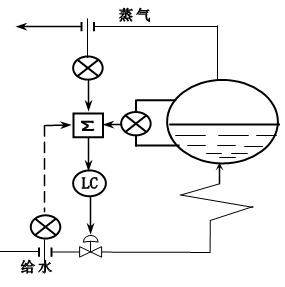
圖一 汽包三沖量控制圖
三沖量控制實(shí)際上是前饋蒸汽流量和串級(jí)控制組成的復(fù)合控制系統(tǒng),系統(tǒng)如圖二所示,
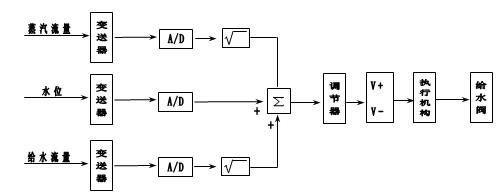
圖二 系統(tǒng)圖
三、方案設(shè)計(jì)
明確整個(gè)控制流程和控制對(duì)像,就可以開(kāi)始設(shè)計(jì)方案了。在早的控制系統(tǒng)中多由模擬PID調(diào)節(jié)器、PLC和智能儀表等完成PID控制;隨著工業(yè)自動(dòng)化軟件的發(fā)展兼各種智能設(shè)備、通訊附件功能的完善,充分利用計(jì)算機(jī)的能力,使本來(lái)由硬件完成的功能慢慢轉(zhuǎn)移到計(jì)算機(jī)處理中,尤其表現(xiàn)在大量數(shù)據(jù)處理的系統(tǒng)中。目前,多個(gè)以力控控制策略為上位機(jī)的控制系統(tǒng)已成功運(yùn)行,系統(tǒng)的結(jié)構(gòu)如圖三示:
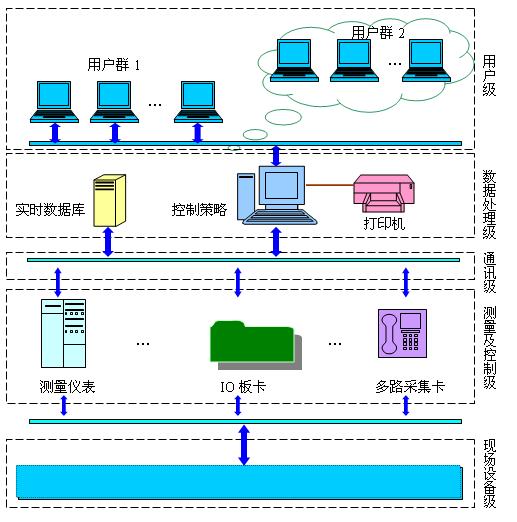
圖三 系統(tǒng)結(jié)構(gòu)圖
優(yōu)越性:在傳統(tǒng)的鍋爐控制系統(tǒng)的方案設(shè)計(jì)中,通常采用DCS、PLC或智能儀表內(nèi)部整合的控制算法完成一系列的PID控制,但是仍有它們的不足之處。首先,這些控制設(shè)備內(nèi)部的控制策略修改起來(lái)很不方便,有些控制策略在系統(tǒng)運(yùn)行期間甚至是不允許修改的。其次,這些控制設(shè)備的控制能力與它的成本成正比率關(guān)系,低廉的設(shè)備只能完成一些簡(jiǎn)單的常規(guī)控制,而且邏輯操作速度不高,控制算法種類也偏少。這些缺陷嚴(yán)重制約著設(shè)備性能的發(fā)揮。而借助力控控制策略豐富的算法,就可以彌補(bǔ)這些設(shè)備在運(yùn)算、控制能力上的不足。
特點(diǎn):力控控制策略是應(yīng)用工程運(yùn)行中的進(jìn)程之一,與力控實(shí)時(shí)數(shù)據(jù)庫(kù)、IO采集一起構(gòu)成了整個(gè)控制系統(tǒng),完成采集數(shù)據(jù)、處理數(shù)據(jù)及控制輸出。所以在系統(tǒng)的設(shè)計(jì)中實(shí)時(shí)數(shù)據(jù)庫(kù)和控制策略間是交互的,它們之間存在著如何建立連接的問(wèn)題,即控制策略算法塊需要以實(shí)時(shí)數(shù)據(jù)庫(kù)為輸入輸出,同時(shí)實(shí)時(shí)數(shù)據(jù)庫(kù)也需要取得算法塊的參數(shù),方便運(yùn)行中動(dòng)態(tài)修改,如PID控制回路的整定。這樣才能確保系統(tǒng)穩(wěn)定地運(yùn)行。
四、軟件實(shí)現(xiàn)
力控控制策略編輯器采用了算法塊圖的形式,設(shè)計(jì)簡(jiǎn)單、操作方便、無(wú)需編寫腳本,根據(jù)系統(tǒng)控制流程就可快速地完成,下面以一個(gè)簡(jiǎn)單的PID控制回路從建立到運(yùn)行的操作過(guò)程為例,具體步驟如下:
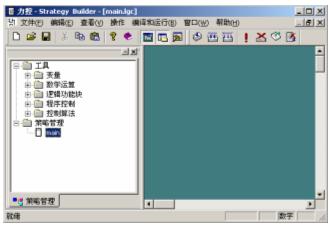
圖四 控制策略編輯窗口
說(shuō)明:
1. 左邊是個(gè)樹(shù)型列表
(1)"工具"下是分類的算法塊
(2)"策略管理"下是策略窗口
2.右邊是當(dāng)前策略編輯窗口
1.建立數(shù)據(jù)庫(kù)變量:運(yùn)行力控開(kāi)發(fā)系統(tǒng)或者實(shí)時(shí)數(shù)據(jù)庫(kù)開(kāi)發(fā)系統(tǒng),進(jìn)入數(shù)據(jù)庫(kù)組態(tài)環(huán)境DbManage,如圖所示:
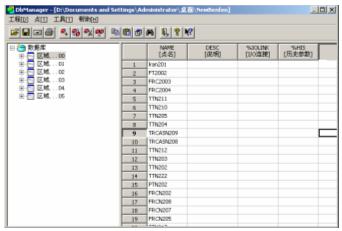
圖五 建立數(shù)據(jù)庫(kù)IO點(diǎn)
說(shuō)明:(1).主要功能是將點(diǎn)與設(shè)備IO點(diǎn)建立一對(duì)一的關(guān)系、點(diǎn)參數(shù)設(shè)置、參數(shù)保存方式及其它處理方法;(2).?dāng)?shù)據(jù)庫(kù)點(diǎn)可分區(qū)域、分單元及分組顯示,一方面方便自己區(qū)分、快速瀏覽;另一方面方便報(bào)警記錄查詢、總貌瀏覽和歷史曲線查詢。
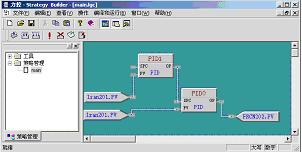
2.建立PID控制回路:進(jìn)入控制策略編輯窗口,將PID控制器拉至右邊策略窗口,或者先點(diǎn)擊PID控制器,再點(diǎn)擊策略窗口欲繪制算法塊的位置。如圖六所示:
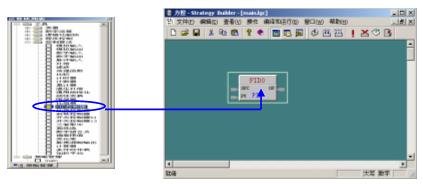
圖六 添加PID控制器
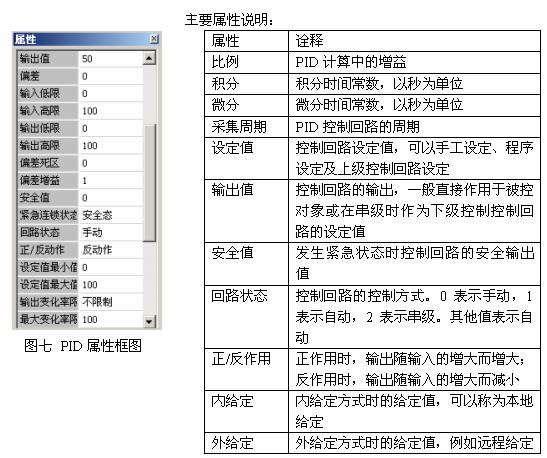
3.設(shè)置PID算法塊屬性及參數(shù),PID算法塊的主要屬性列表如圖七所示:
4.PID控制器的信號(hào)輸入和輸出的連接,具體步驟如下:
4.1繪制PID功能模塊一樣,繪制數(shù)據(jù)庫(kù)輸入變量和數(shù)據(jù)庫(kù)輸出變量,也可以繪制"變量"下的其它的變量塊,方法類同,這里僅以數(shù)據(jù)庫(kù)變量為例,如圖十三所示:
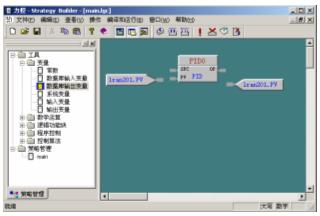
圖十三 繪制數(shù)據(jù)庫(kù)輸入輸出塊
4.2 正確選擇數(shù)據(jù)庫(kù)輸入輸出變量及參數(shù),這些變量都是在數(shù)據(jù)庫(kù)中已定義的點(diǎn),點(diǎn)有很多的參數(shù),變量就是點(diǎn)的某一參數(shù)值,選擇方法如圖十四所示:

圖十四 選擇數(shù)據(jù)庫(kù)變量
4.3 各算法塊的連接方法:將鼠標(biāo)放在算法塊端子處,稍停片刻,若為輸入端子,則鼠標(biāo)變成in,若為輸出端子,則鼠標(biāo)變成out,此時(shí),雙擊鼠標(biāo)一次,再將鼠標(biāo)轉(zhuǎn)致另外算法塊的端子,雙擊鼠標(biāo),若成功,則兩端子間出現(xiàn)白色虛線,將鼠標(biāo)移致別處,則算法塊間出現(xiàn)一條白色實(shí)線。如圖十五所示:

圖十五 已建立連接的算法塊
注意:
連完線后,檢查是否有虛接現(xiàn)象
4.4 簡(jiǎn)單的單PID控制回路已經(jīng)完成,保存,編譯。
5.界面組態(tài)
控制策略完成后,數(shù)據(jù)庫(kù)組態(tài)"DBManage"中發(fā)生了如下變化:

說(shuō)明:增加了以算法塊為變量點(diǎn)的控制策略區(qū)域
5.1 雙擊PID點(diǎn),可以查看PID點(diǎn)參數(shù):

圖九 PID0點(diǎn)的基本參數(shù)屬性頁(yè)
5.2 PID點(diǎn)的參數(shù)與PID控制器的屬性的對(duì)應(yīng)關(guān)系,如表一:
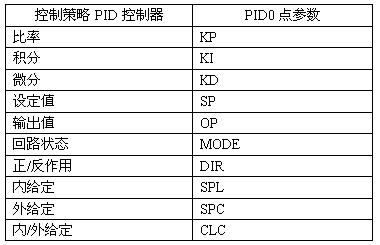
表一 PID點(diǎn)主要參數(shù)表
5.3 為方便PID回路的調(diào)節(jié),畫面設(shè)計(jì)如下:
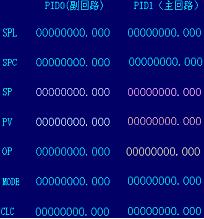
參數(shù)詳細(xì)說(shuō)明見(jiàn)圖七及表一
6.編譯、運(yùn)行

圖十 實(shí)時(shí)數(shù)據(jù)庫(kù)和控制策略進(jìn)程
7.PID調(diào)節(jié)
PID調(diào)節(jié)的最終目標(biāo)是使系統(tǒng)達(dá)到穩(wěn)定狀態(tài),使最大動(dòng)態(tài)偏差盡可能小、調(diào)節(jié)時(shí)間最短、調(diào)節(jié)過(guò)程系統(tǒng)輸出的誤差積分值最小等等,綜合這些首先我們必須明確力控PID算法原理和PID對(duì)系統(tǒng)調(diào)節(jié)的影響趨勢(shì)。
控制算法公式如下:
比例項(xiàng) = 比例 *(本次偏差 - 上次偏差)
積分項(xiàng) = 比例 * 偏差 * 采集周期 / 積分時(shí)間常數(shù)
微分項(xiàng) = 比例 *微分時(shí)間常數(shù) *(本次偏差 - 2*上次偏差 + 上兩次偏差)/采集周期
如果是正動(dòng)作,則:
輸出 = 上次輸出 + 比例項(xiàng)+ 積分項(xiàng) + 微分項(xiàng)
如果是反作用,則:
輸出 = 上次輸出 - 比例項(xiàng)- 積分項(xiàng) - 微分項(xiàng)
比例系數(shù)KP加大使系統(tǒng)的動(dòng)作靈敏,速度加快,穩(wěn)態(tài)誤差減小,KP偏大,振蕩次數(shù)加多,調(diào)節(jié)時(shí)間加長(zhǎng)。KP太大時(shí),系統(tǒng)會(huì)趨于不穩(wěn)定。KP太小,又會(huì)使系統(tǒng)的動(dòng)作緩慢。KP可以選負(fù)數(shù),這主要是由執(zhí)行機(jī)構(gòu)、傳感器以控制對(duì)象的特性決定的。如果KP的符號(hào)選擇不當(dāng),對(duì)象狀態(tài)(PV值)就會(huì)離控制目標(biāo)的狀態(tài)(SP值)越來(lái)越遠(yuǎn),如果出現(xiàn)這樣的情況KP的符號(hào)就一定要取反;積分控制KI對(duì)系統(tǒng)性能的影響:積分作用使系統(tǒng)的穩(wěn)定性下降,KI小(積分作用強(qiáng))會(huì)使系統(tǒng)不穩(wěn)定,但能消除穩(wěn)態(tài)誤差,提高系統(tǒng)的控制精度;微分控制KD對(duì)系統(tǒng)性能的影響:微分作用可以改善動(dòng)態(tài)特性,KD偏大時(shí),超調(diào)量較大,調(diào)節(jié)時(shí)間較短。KD偏小時(shí),超調(diào)量也較大,調(diào)節(jié)時(shí)間也較長(zhǎng)。只有KD合適,才能使超調(diào)量偏小,減短調(diào)節(jié)時(shí)間。
8.單PID控制回路的特點(diǎn)及無(wú)擾切換
8.1 PID控制回路的特點(diǎn):
手動(dòng)控制方式:PID控制器的輸出由手動(dòng)完成,SPL、SPC、SP、PV具有自動(dòng)跟蹤功能目的是使手動(dòng)到自動(dòng)無(wú)擾動(dòng)切換,最終穩(wěn)定在OP值。
自動(dòng)控制方式:SPL、SPC和SP由操作員設(shè)定,PID回路完成PID算法,OP最終穩(wěn)定在SP值。
8.2 無(wú)擾切換方法:
由手動(dòng)->自動(dòng)無(wú)擾切換:將PID點(diǎn)參數(shù)MODE值由0設(shè)為1
由自動(dòng)->手動(dòng)無(wú)擾切換:將PID點(diǎn)參數(shù)MODE值由1設(shè)為0
9.串級(jí)控制回路的特點(diǎn)及無(wú)擾切換
對(duì)一個(gè)PID控制器來(lái)講,有一個(gè)輸入端為SPC,懸空時(shí)構(gòu)成為簡(jiǎn)單的單回路控制,若要完成更復(fù)雜的控制,如實(shí)現(xiàn)外給定或遠(yuǎn)程給定等。本文以串級(jí)控制回路為例,詳細(xì)說(shuō)明力控串級(jí)控制系統(tǒng)的特點(diǎn)及各種無(wú)擾動(dòng)切換過(guò)程,同時(shí)我們將更深入地了解PID控制器的幾個(gè)參數(shù)之間存在的相互制約關(guān)系。
首先,再建立一個(gè)PID控制回路PID1,將PID1的輸出OP連接到PID0的SPC端,設(shè)置好PID1控制器的屬性,主副回路都默認(rèn)設(shè)置為手動(dòng)方式和內(nèi)給定,這樣就構(gòu)成了以PID0為副回路、以PID1為主回路的串級(jí)控制系統(tǒng)。如圖十八示:
補(bǔ)充說(shuō)明:
系統(tǒng)中對(duì)于數(shù)據(jù)庫(kù)輸出變量算法塊增加了一個(gè)輸出死區(qū)屬性,這個(gè)功能在一定程度上減緩了數(shù)據(jù)庫(kù)的變化頻率,減輕了系統(tǒng)的負(fù)荷,提高了系統(tǒng)的穩(wěn)定性。
圖十八 串級(jí)控制回路
控制策略編輯好后,保存并編譯。為方便操作PID及無(wú)擾動(dòng)切換,可以在力控開(kāi)發(fā)環(huán)境下創(chuàng)建畫面窗口,連接主副回路PID點(diǎn)。
9.1 串級(jí)控制回路的特點(diǎn):
副回路沒(méi)有設(shè)置成外給定方式時(shí)(副回路PID的CLC值為0),串級(jí)回路的特點(diǎn)為:
①主回路只能工作在手動(dòng)方式:改變副回路的OP值,主回路自動(dòng)跟蹤,使切換到自動(dòng)為無(wú)擾動(dòng)的,其中主回路的OP值傳遞給副回路。
②副回路為自動(dòng)方式時(shí),副回路完成PID算法,主回路的SP值和副回路SPL、SPC和SP一致,處于不變狀態(tài)。需要一個(gè)新的穩(wěn)定狀態(tài)時(shí),改變副回路OP值即可。
副回路設(shè)置為外給定方式時(shí)(副回路PID的CLC值為1),串級(jí)回路的特點(diǎn):
①副回路不能在手動(dòng)方式下工作
②主回路可以工作在手動(dòng)、自動(dòng)控制方式,若有需要,也可將給定方式設(shè)定為外給定:
主回路手動(dòng)方式工作時(shí),改變OP值來(lái)控制副回路的給定;主回路自動(dòng)方式下工作時(shí),設(shè)置副回路為串級(jí)工作方式,就構(gòu)成了串級(jí)控制回路,主回路的OP傳遞給副回路的SPC,SPL和SP值自動(dòng)跟蹤。需要建立新的動(dòng)態(tài)平衡時(shí),只需重新設(shè)定主回路的SPL值即可
9.2無(wú)擾切換方法:
①手動(dòng)->自動(dòng)無(wú)擾動(dòng)切換:副回路MODE值由0變?yōu)?
②自動(dòng)->手動(dòng)無(wú)擾動(dòng)切換:副回路MODE值由1變?yōu)?
③自動(dòng)->串級(jí)無(wú)擾動(dòng)切換:副回路CLC由0變?yōu)?,主回路MODE由0變?yōu)?,副回路MODE由1變?yōu)?
④串級(jí)->自動(dòng)無(wú)擾動(dòng)切換:副回路MODE由2變?yōu)?,主回路MODE由1變?yōu)?,副回路CLC由1變?yōu)?。
⑤手動(dòng)->串級(jí)無(wú)擾動(dòng)切換:副回路MODE由0變?yōu)?,副回路CLC由0變?yōu)?,主回路MODE由0變?yōu)?,副回路MODE由1變?yōu)?
⑥串級(jí)->手動(dòng)無(wú)擾動(dòng)切換:副回路MODE由2變?yōu)?,主回路MODE由1變?yōu)?,副回路CLC由1變?yōu)?,副回路MODE由1變?yōu)?。
10.結(jié)束語(yǔ)
力控控制策略將在成本、開(kāi)放性、靈活性、功能和界面等方面給企業(yè)用戶提供了最佳的控制系統(tǒng)解決方案。
