詳細說明QZSMC6000功能特點
● 只需一臺工業電腦就可以實現高端靈活運動控制,完全擺脫硬件控制器和控制卡。
● 可實現32軸,32通道控制,0.5ms伺服控制周期,500多個API運動控制函數,實現各種復雜軌跡控制。
● 在Windows上運行,通過實時系統保證us級硬實時,穩定性保證。
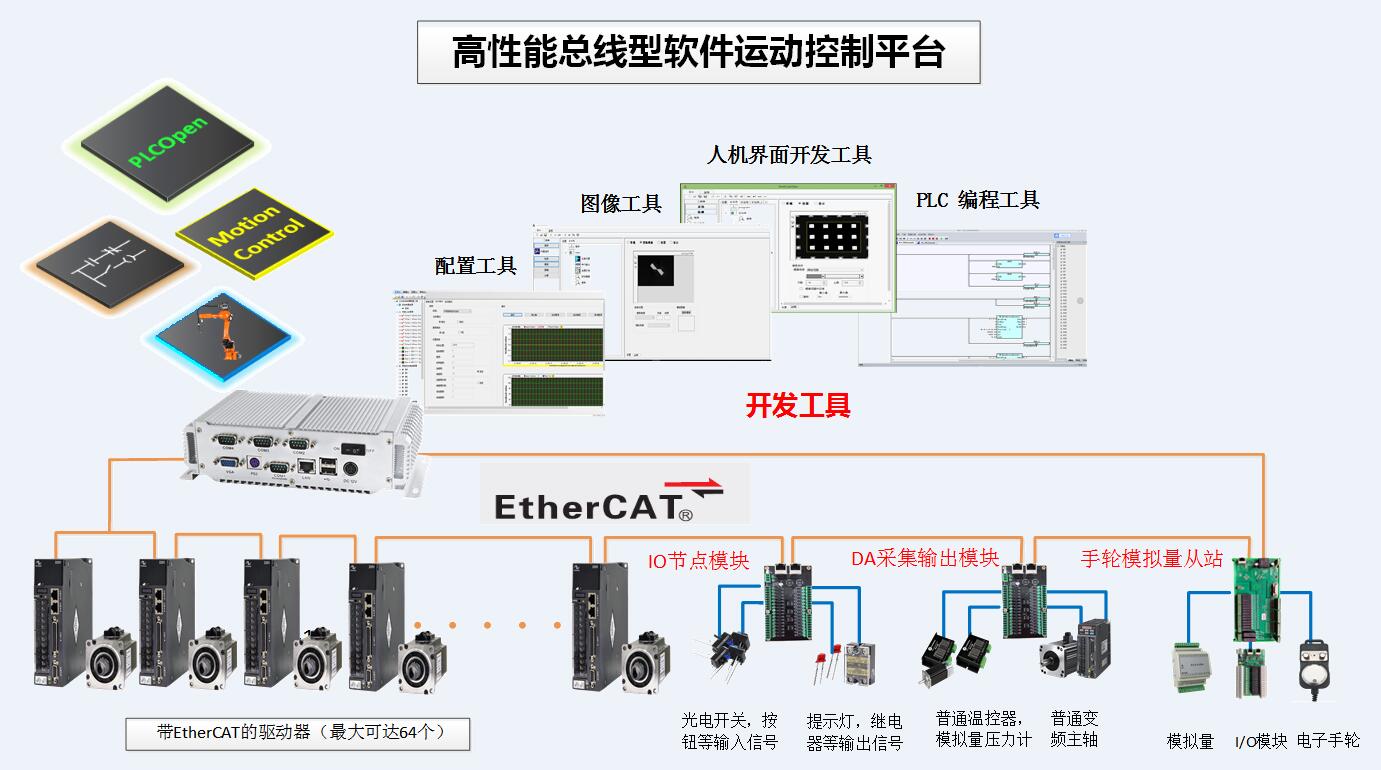
● 包含EtherCAT主站,方便的監視和配置工具,還可以使用EtherCAT網絡管理API直接對從站進行操作。
● 可同時對多臺自動化設備和工業機器人進行協同高效控制。
● 適用于各種3C電子,手機組裝測試、貼片、包裝、電池等自動化設備的控制,國內外核心設備制造商的選擇。
產品優勢
1.創新性和經濟性
● 無需昂貴的專用處理芯片,軟件運動控制可以輕松實現復雜的各種算法和通訊
● 無需任何運動控制板卡,軟件運動控制可在內核中進行多軸的高性能的閉環算法
● 最小化的通用硬件可以帶來顯而易見的經濟性,以及簡易的接口和線纜,打打較少故障率
● 安裝和集成十分簡便快捷,加速產品上市時間
2.強大的性能
● 充分發揮目前通用CPU的超高速、超精確(雙精度浮點運算)的運算能力
● 隨著CPU的速度和性能的提高,軟件運動控制算法速度和性能也隨之提高
● 運動控制內核完成實時控制閉環算法、前饋、路徑規劃、插補、加減速曲線、補償、平滑等功能
● 運動控制內核和軟PLC內核無縫集成,協作控制
● 支持多種運動控制模式和眾多可選供能
3.定制化和可擴展
● 提供開放式的平臺和開發環境,用戶可以實現獨特的產品理念,用自身的技術經驗構建最好的運動控制產品
● 用戶可輕松集成第三方的應用到統一的運動控制平臺上,如視覺系統、數據庫、網絡應用等
4.簡單快速的系統集成
● 因為最小化的硬件,布線和連接十分簡易
● 提供設置測試軟件
● 完善的技術文檔和國際性的技術支持
● 提供各種應用示例程序
5.靈活的硬件組合
● 靈活配置軸數目和IO點數
● 靈活選用各種EeherCAT總線伺服和IO模塊
● 可選用各種通用脈沖型伺服、步進伺服
● 可選用EtherCAT總線主軸驅動器或模擬量變頻器
● 可控制各種直線電機和DD馬達
● 可選用各種通用的顯示器、鍵盤鼠標或PC用觸摸屏,也可選用CNC專用面板和示教
技術概要 Technology
PLC內核
● PLC 內核與運動控制內核無縫集成,協作執行PLC順序程序;
● 與三菱PLC指令和梯形圖邏輯兼容;
● 提供確定性的,實時的性能保證,掃描周期1-5ms;
● 可檢測運動狀態和發送運動指令(PLC軸功能);
運動解釋器內核
● 每秒1000個程序段高速處理;
● 包含運動指令的環狀高速緩存;
操作系統
SoftMotionControler的運動控制軟件(包含實時內核)可以運行在微軟公司的Windows XP和Windows 7上(32/64)。無論是操作還是開發,Windows系統都給了開發者和用戶最短的適應和開發周期,提供了最友好的操作界面和最大的擴展性。
實時子系統
眾所周知,Windows是非實時的操作系統,無論直接用來進行嚴苛的運動控制。通過實時軟件,可以將Windows轉變成實時操作系統。
通過在操作系統上添加實時的,先占式的多任務機制使得在Windows下可以實現實時程序的開發以及處理高性能、硬實時特性的關鍵任務。計時精度可達1微秒。終端延遲(IST latencies)小于10微秒。因此,用一臺電腦上,操作系統可以同時進行實時和非實時的任務處理,并且Windows進程無法干涉實時進程的運行。
運動控制內核
運動控制內核是整個軟件架構的基礎與核心。位置環和速度反饋環可以在運動控制內核中進行閉環控制(根據控制模式和伺服控制周期的不同);運動控制內核完成實時運動控制閉環算法、路徑規劃、插補、加減速曲線、補償、平滑等功能;運動控制內核從高層的用戶應用中接受指令,并通過總線將命令傳送給伺服和IO設備。
![]()
| 最大控制軸數 | 64軸,最大16通道 |
| 插補類型 | 直線 (6 軸), 圓弧 (2-3 軸), 螺旋(3 軸) |
| 加減速類型 | 梯形,S 形,加加速度。加速和減速曲線可單獨設置。 |
| 運動控制 | 點動,回零,PTP,List Motion,連續緩沖區執行,支持連續插補運動,連續插補緩沖區可裝5000 條指令。在連續插補運動中支持1-6軸直線插補、兩軸圓弧插補、兩軸同心圓插補、兩軸及三軸螺旋線插補、空間圓弧插補、兩軸矩形插補等算法;支持Blend 拐角平滑過渡、小線段前瞻、連續插補暫停延時、IO控制等功能 |
| 重載 | 在運動中改變目標位置(PTP)和速度(PTP / DVC)或加速曲線參數 |
| 同步控制(主從控制) | 最多有32對(多個從動軸支持),龍門軸控制 |
| 插補周期 | 默認1ms(可配置0.25ms-4ms) |
| 支持控制方式 | 位置/速度/轉矩(PID閉環) |
| 位置補償特征 | 螺距誤差補償,反向間隙補償,直線度補償,溫度補償 |
| 最大的I/O 點 | 11600/ 11600(各1KB)。支持眾多第三方EtherCAT從站設備 |
| 自主UDI | 可擴展4路普通步進電機和伺服電機 |
| 事件函數 | 基于事件的I / O和運動控制 |
| 主要的EtherCAT功能 | COE,FOE,DC分布時鐘,線/星/樹型拓撲,熱插拔,網絡管理API |
| 軟件IO觸發鎖存 | 觸發時間0.5ms |
| 軟件位置觸發IO | 觸發時間0.5ms,支持IO定時反轉 |
| PVT功能 | 支持多達5000個位置點的PVT 運動曲線規劃高級功能,根據位置點的相
關數據:時間、位置、速度,實現在準確的時間點以準確的速度到達確定的位置;可通過自定義數據實現復雜軌跡多軸連續插補運動功能。 |
| 手輪功能 | 支持手輪運動配置功能。可任意配置一個軸或多個軸按不同的倍率跟隨一個手輪運動。任意配置跟隨軸增強了手輪復用性能,多軸跟隨手輪可實現多軸協同精確定位功能。 |
| 運動中IO翻轉 | 支持IO 輸出延時翻轉功能,可實現輸出脈沖信號精確控制執行機構動作,如:照相機曝光時間控制,點膠機出膠量控制等。
|
